zł25.08 tax excl.
Pololu - 1502
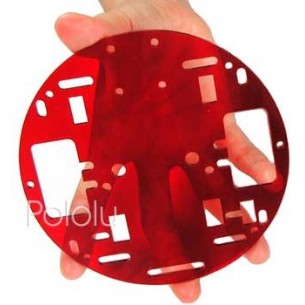
This chassis base plate is a round piece of 1/8" (3 mm) acrylic with a 5" (127 mm) diameter and cutouts for building a differential-drive robot chassis based on our micro metal gearmotors and 42×19mm wheels. The chassis has assorted general-purpose holes and slots that support many configurations of sensors and other robot components.
DESCRIPTION
Overview
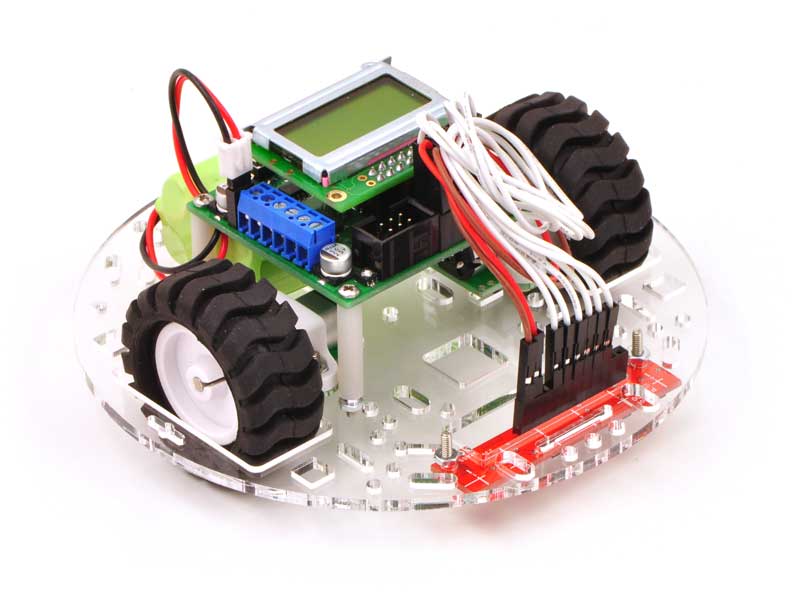
The 5" robot chassis RRC04A is an 1/8" acrylic chassis that provides a base for our micro metal gearmotors, extended brackets, and 42×19mm wheels. The robot chassis has many mounting holes that let you mount a variety of robot components to it. With a diameter of only five inches, this acrylic chassis is great for building robots capable of navigating tight spaces.
Pololu 5" round robot chassis RRC04A
with an Orangutan SV-328
and a QTR sensor array.
The RRC04A robot chassis is available in a variety of colored (and clear) acrylics:
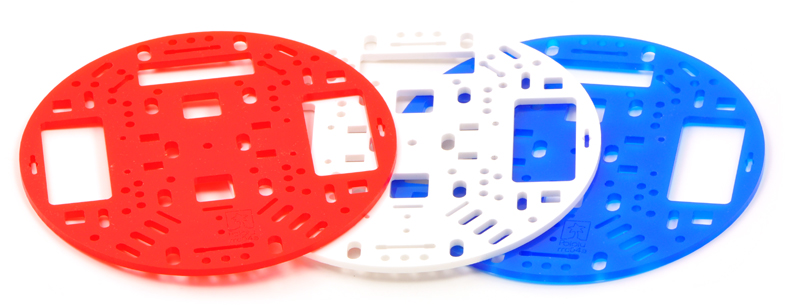
The Pololu 5" robot chassis RRC04A
is available in a variety of colors.
Required Components (not included)

Some Compatible Components
You might find our premium jumper cables helpful in connecting various components.
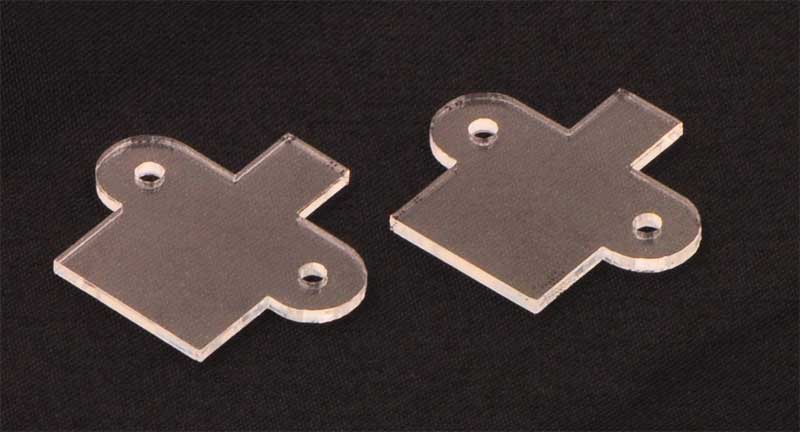
Included Spacers
The laser-cut chassis is designed to work with the Pololu encoders. If you do not use the encoders, you can use the two included spacers that keep the chassis at the same height. The spacers are cut out of 1/16" clear acrylic.
Using the chassis
The motors can be mounted on either side of the chassis (top or bottom). With the motors mounted on the bottom, the chassis will be roughly 1" from the ground, and you can use the Pololu 1" ball caster as a third point of contact with the floor. With the motors mounted on the top, the chassis will be a roughly 0.4" from the ground, making the Pololu 3/8" ball caster with the included 1/16" spacer the best fit.

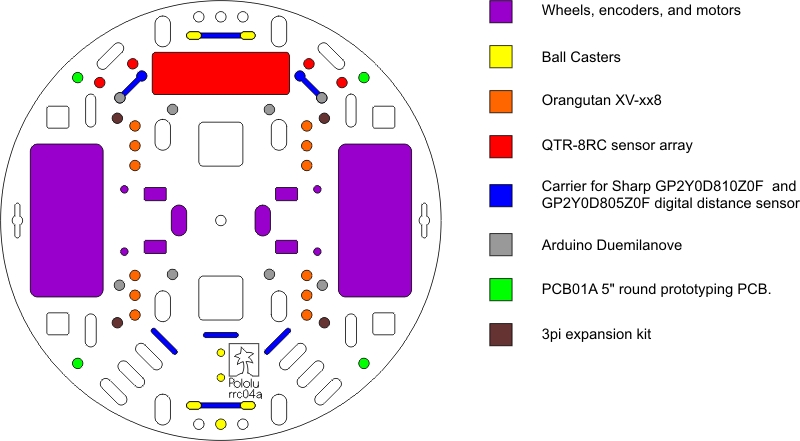
There are many different ways to connect the compatible components to the chassis. You can refer to the diagram showing where compatible components can be mounted for further information about where you might mount various components. Some configurations require standoffs. You can see additional pictures of examples in the pictures tab.
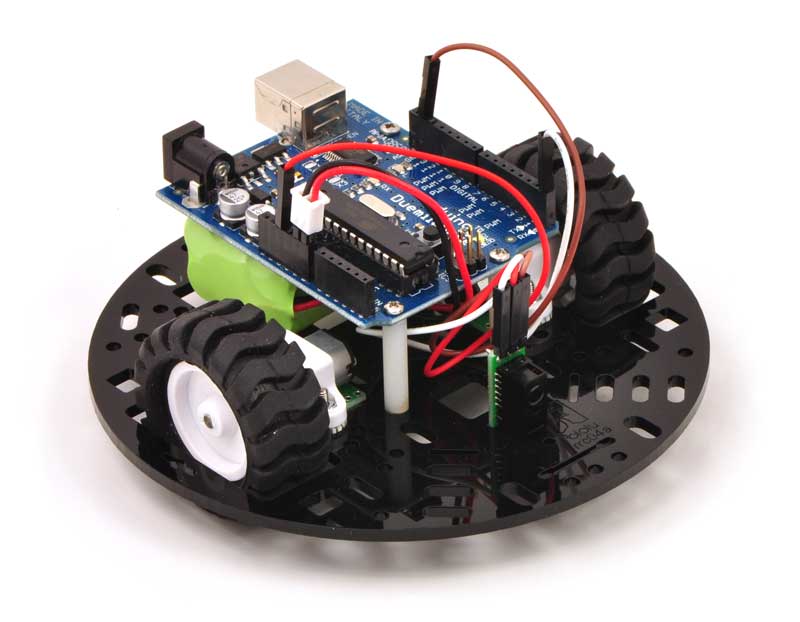
Pololu 5" round robot chassis RRC04A
with an Arduino Duemilanove
and a Sharp digital distance sensor.
SPECIFICATIONS
General specifications
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
A set of two Pololu wheels measuring 43x19 mm in white. Fits D-shaped shaft with a diameter of 3 mm. Pololu 1090
Pololu Ball Caster with 3/8" Metal Ball
No product available!
Small, plastic support ball, 1" diameter (25.4 mm). It can be used as a support element in a two-wheeled mobile robot. Pololu 952
50:1 Micro Metal Gearmotor
No product available!
Orangutan SV-328 Robot Controller
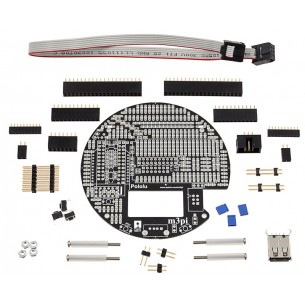
Kit to expand the Pololu 3pi robot to Pololu m3pi with a mbed socket board. Includes non-soldered PCB as well as necessary connectors and components for self-assembly. Pololu 2152
QTR-8RC Reflectance Sensor Array
No product available!
The versatile Romi chassis is a great starting point for your next mobile robot. This kit includes all the basic mechanical parts to get up and running, including two motors, two wheels, one ball caster, and battery contacts. The wheels and ball are white; all other plastic components are pink.
Chassis Romi Chassis Kit is the ideal base for building a small mobile robot. The set contains all the necessary mechanical elements for building a mobile circular robot. Self-assembly set. Polol 3504
Chassis construction kit for the Pololu 3pi+ 32U4 robot. It enables the construction of a mobile robot with a differential drive based on the selected micro Pololu motor and electronics. Pololu 3725
Round acrylic plate with a diameter of 12.7 cm, dedicated to be used as a chassis for small mobile robots. Pololu 256
Pololu 1500 is an RRC04A acrylic robot chassis with a 5-inch diameter, designed for building compact robots using Pololu micro metal gearmotors and 42×19 mm wheels. It allows flexible placement of electronic components, sensors, and controllers, making it suitable for educational and hobby projects.
No product available!
Chassis Romi Chassis Kit is the ideal base for building a small mobile robot. The set contains all the necessary mechanical elements for building a mobile circular robot. Self-assembly set. Polol 3509
No product available!
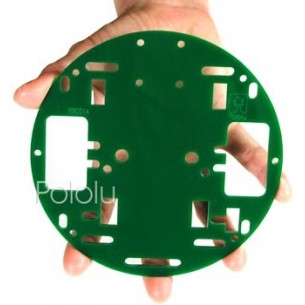
Pololu Robot Chassis RRC01A Solid Blue
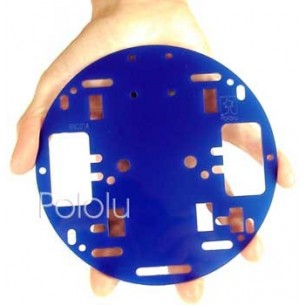
Pololu Robot Chassis RRC01A Transparent Gray
No product available!
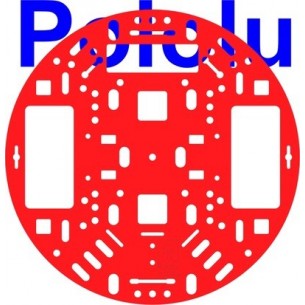
Pololu Robot Chassis RRC01A Transparent Red
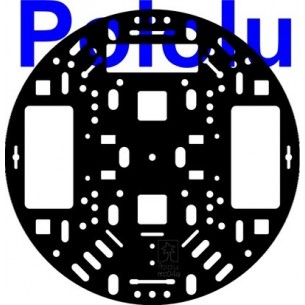
Pololu 1501 is a black acrylic RRC04A robot chassis designed for building 5-inch diameter robots. It allows easy integration with micro gearmotors, wheels, and sensors, providing flexible construction options for educational and hobby projects.
No product available!
Pololu Robot Chassis RRC01A Solid Red
No product available!
Kit includes all the basic mechanical parts to get up and running, including two motors, two wheels, one ball caster, and battery contacts. Pololu 3500
No product available!
The versatile Romi chassis is a great starting point for your next mobile robot. This kit includes all the basic mechanical parts to get up and running, including two motors, two wheels, one ball caster, and battery contacts. The wheels and ball are white; all other plastic components are red.
Chassis Romi Chassis Kit is the ideal base for building a small mobile robot. The set contains all the necessary mechanical elements for building a mobile circular robot. Self-assembly set. Polol 3506
Pololu - 1502