zł16.18 tax excl.
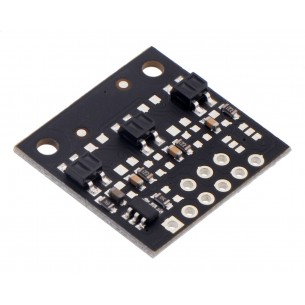
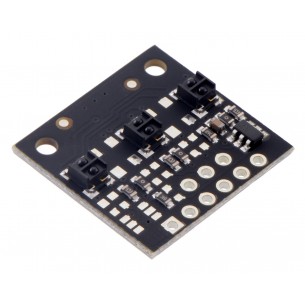
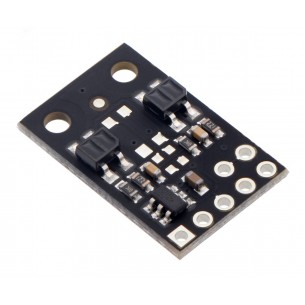
Module with 2 QTRX type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4442
Reflectance sensor consisting of array 2 QTRX optocouplers with the ability to individually control the brightness of each of the infrared LEDs. The sensors on the board are medium density (MD) and the distance between them is 8 mm. The module can be supplied with the voltage ranging from 2.9 V to 5.5 V and draws current up to 5 mA. The optimum distance from the sensor to the ground is 10 mm and the maximum distance is 30 mm. The module is ideally suited for detecting changes in light reflection, so it can be used for edge detection or line tracking in linefollower robots.
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Dual motor controller that allows you to control two DC motors with 2.7-10.8V voltage and 1.2A continuous current per channel. Pololu 2130
Chassis Romi Chassis Kit is the ideal base for building a small mobile robot. The set contains all the necessary mechanical elements for building a mobile circular robot. Self-assembly set. Polol 3506
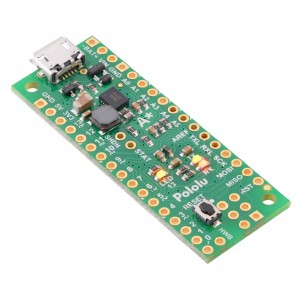
The platform is based on the Atmega 32U4 microcontroller with a default Arduino compatible bootloader, 26 O / I ports and a microUSB port. Polol 3145
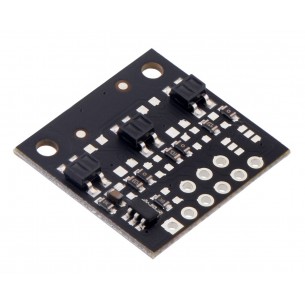
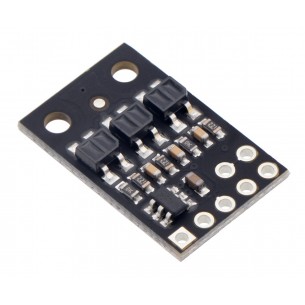
Module with 3 QTR type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4143
No product available!
Module with 3 QTR type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4243
Module with 3 QTRX type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4343
Module with 3 QTRX type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4443
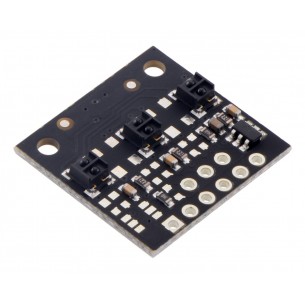
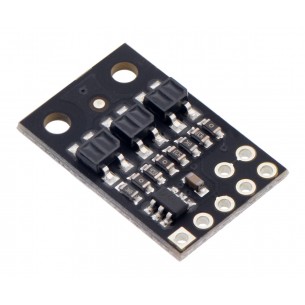
Module with 3 QTR type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4103
Module with 3 QTR type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4203
Module with 3 QTRX type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4303
Module with 3 QTRX type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4403
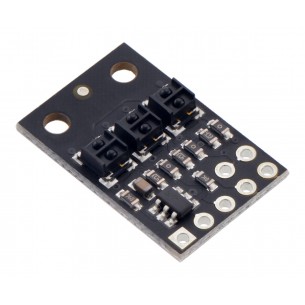
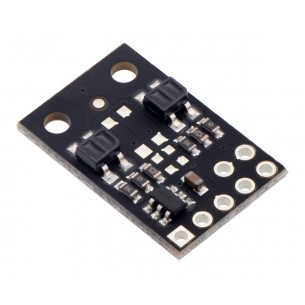
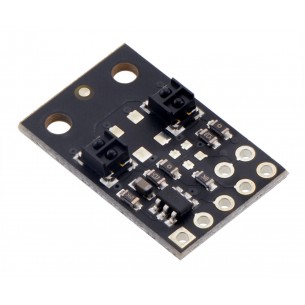
Module with 2 QTR type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4142
Module with 2 QTR type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4242
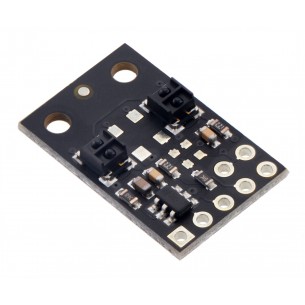
Module with 2 QTRX type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4342
Module with 2 QTRX type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4442
No product available!
Module with 9 QTR type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4109
Module with 9 QTR type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4209
Module with 9 QTRX type optocoupler with RC (digital) output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4309
Module with 9 QTRX type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 40 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4409
No product available!
Module with 2 QTRX type optocoupler with analog output. The module operates from 2.9 V to 5.5 V, detects objects at a distance of up to 30 mm. The sensor will be used in projects that require detection of changes in the ground, e.g. in linefollower robots. Pololu 4442