- Out-of-Stock










A set for building a mobile robot with Mecanum chassis based on Raspberry Pi. Equipped with Raspberry Pi Build HAT expansion module and 5 MP camera. Waveshare BuildMecar-Kit-B
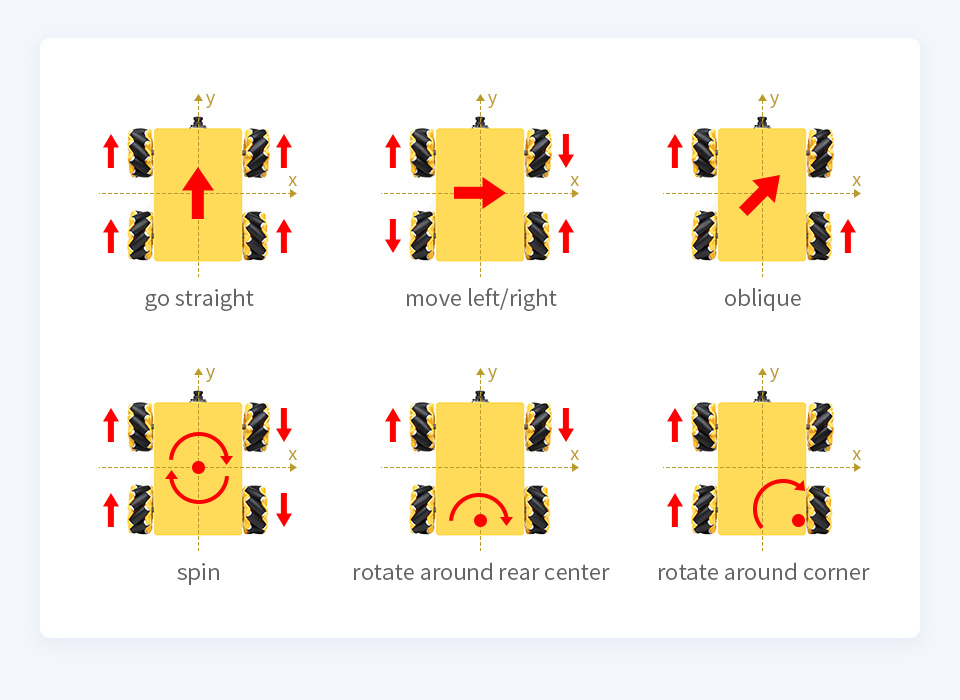
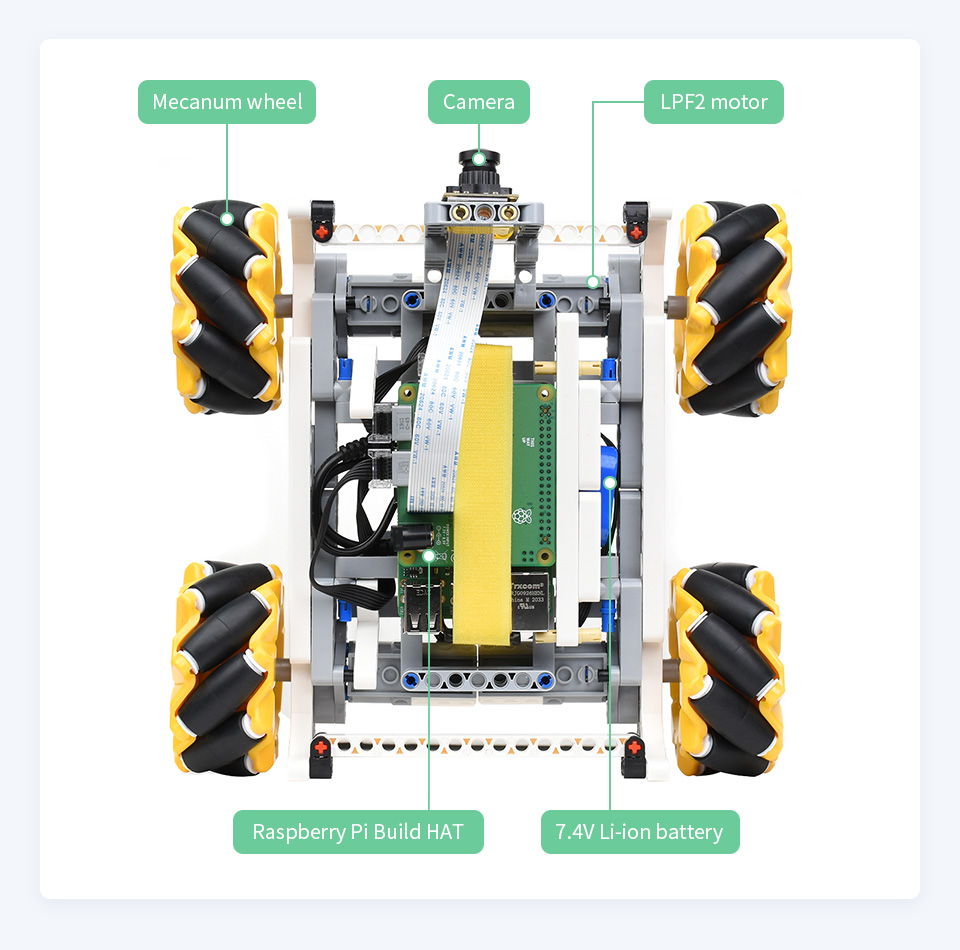
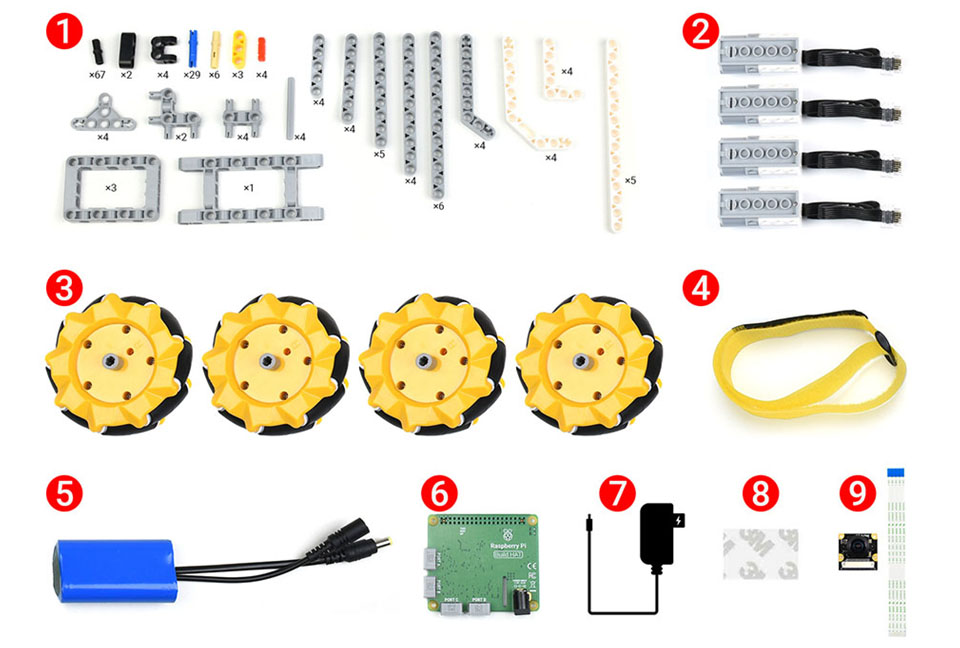
A set for building a mobile robot with a Mecanum chassis based on a Raspberry Pi minicomputer. The design is based on a set of blocks that allow you to easily modify the vehicle and adapt it to your own needs. The robot is driven by four DC motors and Mecanum wheels, which allow it to move not only forward and backward, but also sideways, which significantly increases its mobility and is an interesting alternative to standard drive systems.
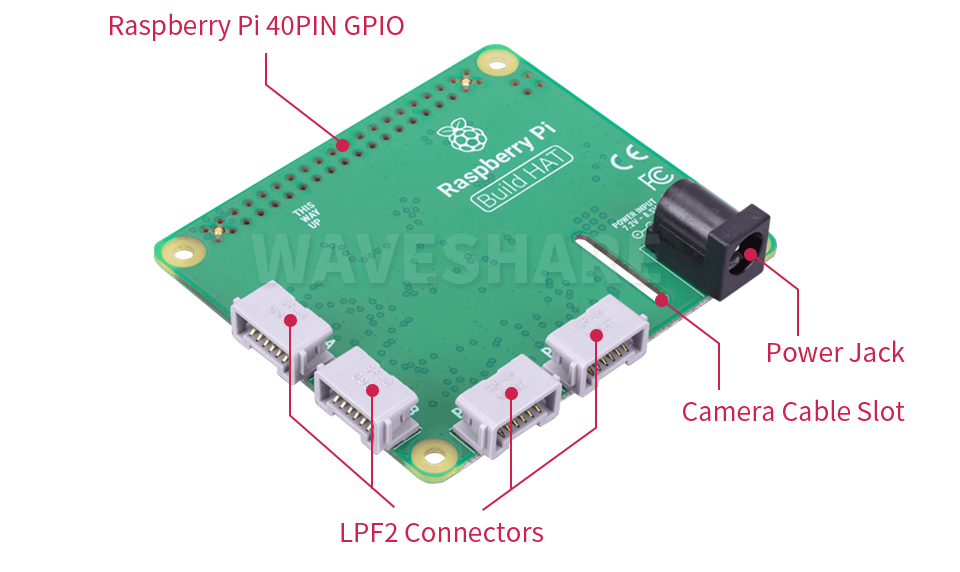
The robot uses the Raspberry Pi Build HAT driver, the official expansion board designed in collaboration with LEGO® Education. It was created to make it easier to control LEGO motors and sensors using RPi mini computers. The HAT comes with four connectors for LEGO Technic motors and sensors from the LEGO® Education SPIKE ™ Prime series.
The set is powered by a 7.4 V Li-Ion battery. The set also includes a 5 MP camera with an OV5647 sensor and a 160° wide-angle lens.
The Build HAT Python library allows you to control various motors and sensors with the LPF2 connector, allowing you to create creative combinations using the Build HAT overlay and building blocks. Full documentation and configuration examples are available on the product page.
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
The latest version of the Raspberry Pi series: Raspberry Pi 4 model B with quad-core SoC (Broadcom BCM2711, Cortex-A72) working at 1.8GHz, 1GB RAM LPDDR4, Broadcom VideoCore VI layout.
The latest version of the Raspberry Pi series: Raspberry Pi 4 model B with quad-core SoC (Broadcom BCM2711, Cortex-A72) working at 1.8GHz, 2GB RAM LPDDR4, Broadcom VideoCore VI.
No product available!
The long-awaited Raspberry Pi 4 model B with the SoC Broadcom BCM2711 SoC (4 x Cortex-A72) running at 1.8 GHz, 4 GB LPDDR4 RAM and the Broadcom VideoCore VI graphics chip
The long-awaited Raspberry Pi 4 model B with the SoC Broadcom BCM2711 SoC (4 x Cortex-A72) running at 1.8GHz, 8 GB LPDDR4 RAM and the Broadcom VideoCore VI graphics chip
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
No product available!
A set for building a mobile robot with Mecanum chassis based on Raspberry Pi. Equipped with Raspberry Pi Build HAT expansion module and 5 MP camera. Waveshare BuildMecar-Kit-B






![ATAVRRZRAVEN [NRND] -> ATAVRRZ600](https://kamami.pl/1477-home_default/atavrrzraven-nrnd---atavrrz600.jpg)