











")

zł1,722.37 tax excl.
The robot can recognize the attitude in real time using an acceleration and gyroscope sensor, as well as achieve balance by controlling the motors to adjust the position. Terasic P0582
A set with a balancing robot from Terasic, a multifunctional robot designed and manufactured by Terasic Robtic Exeperts. Built on the basis of the DE10-Nano Terasica plate, a light SoC platform, ideal for embedded solutions, equipped with the most modern control algorithm. The robot can recognize the attitude in real time using an acceleration and gyroscope sensor, as well as achieve balance by controlling the motors to adjust the position. You can implement the posture algorithm, perform a control movement and perform movements autonomously, such as moving forward, turning right and left, tracking the object and avoiding obstacles. The robot is equipped with a Bluetooth / WiFi module and an infrared receiver, so it can be controlled remotely.
DE10-Nano Board
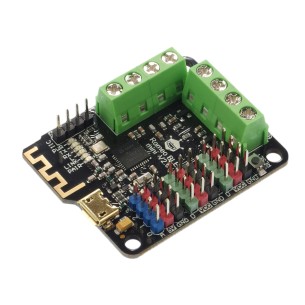
Engine Driver Board
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Terasic Spider is a six-legged robot rolling with 18 servos controlled by the Altera DE0-Nano-SoC board connecting the FPGA chip and the ARM Cortex-A9 processor. The set contains a complex robot and numerous accessories. P0425
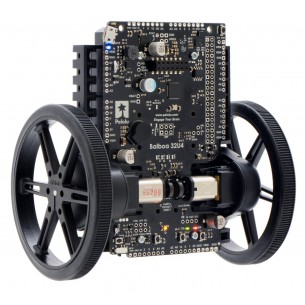
A set for building a balancing robot. It has a board with an ATmega 32u4 microcontroller, engine controllers, modules with quadrature encoders and an IMU system (gyroscope, accelerometer, magnetometer). Pololu 3575
Great for learning the basics of gears and linkages, this Tamiya kit contains all the parts necessary to make a remote controlled crawler that picks up ping pong balls. Pololu - 2389
Kit for building a minisumo robot on a crawler chassis. It has a bulldozer, control board and a set of caterpillars. Robot version for self-assembly, requires additional motors, Arduino controller and four AA batteries. Pololu 2509
No product available!
Base plate for General Mobile Robot robots adapted to work with one Arduino Mega board, two Arduino Nano and two wireless communication modules. The board is equipped with a micro-SD card slot. DFRobot DFR0271
No product available!
MiniQ 4WD Cross Country fully assembled, especially designed for learning purpose. All your need is a PC with Arduino IDE and 4xAA battery. This upgraded version of MiniQ 4WD Kit comes with new Arduino Leonardo controller (ATmega32u4). ROB0111
No product available!
Complete Robot Kit with Romeo V2 All-in-one controller, Sharp GP2Y0A21 Distance Sensor, 9g micro servo which allow you to install sensors, servos and even do some prototypings. KIT0071
No product available!
No product available!
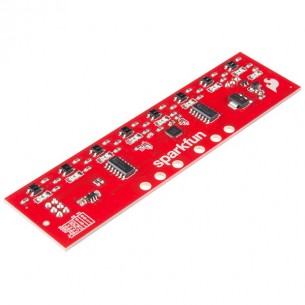
This is the Wheel Encoder Kit from DAGU, a simple add-on to any wheeled robot that can help measure the speed or distance the chassis travels. ROB-12629
No product available!
Terasic Spider is a six-legged robot rolling with 18 servos controlled by the Altera DE0-Nano-SoC board connecting the FPGA chip and the ARM Cortex-A9 processor. The set contains a complex robot and numerous accessories. P0425
Evaluation kit with Bluetooth 4.0 module. It has 8 digital pins, 4 analog pins and 4 PWM. Compatible with Arduino, it is perfect as a platform for building a small robot. DFRobot DFR0351
The Insect Bot mini is an easy to assemble robot for young engineers from 6 to 100, ideal for DIY projects, wearable projects and etc. Its body is made up of two 9-gram servos powered by a rechargable 3.7V LiPo battery. Its eyes are an infrared sensor to detect obstacles. DFRobot KIT0051
With a celebrated reputation as an affordable, simple and fun-to-play DIY robot kit, the Insectbot breed has now evoled to its second generation: the Insectbot Hexa. KIT0090
The A-Cute Car is an FPGA-based three-wheeled robotic car kit. This car can provide higher operation performance than the MCU based robotic car, because the FPGA provides more powerful computing power than the MCU. P0467
No product available!
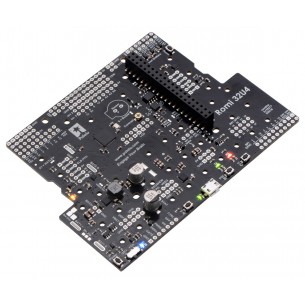
This control board turns the Romi chassis into a programmable robot based on the Arduino-compatible ATmega32U4 MCU. Pololu 3544
No product available!
A set for building a balancing robot. It has a board with an ATmega 32u4 microcontroller, engine controllers, modules with quadrature encoders and an IMU system (gyroscope, accelerometer, magnetometer). Pololu 3575
The robot can recognize the attitude in real time using an acceleration and gyroscope sensor, as well as achieve balance by controlling the motors to adjust the position. Terasic P0582