











")
")

zł555.30 tax excl.
The RoboClaw Solo motor controllers from Basicmicro (formerly Ion Motion Control) can control a single brushed DC motor using USB serial, TTL serial, RC, or analog inputs. Pololu 3291
This version can supply a continuous 60 A (100 A peak) and operates up to 34 V.
The RoboClaws from Basicmicro (formerly Ion Motion Control) are a family of efficient, versatile, synchronous regenerative motor controllers. They can supply brushed DC motors with 7.5 A, 15 A, 30 A, 45 A, 60 A, or 120 A continuous (depending on the model) at voltages from 6 V to 34 V or 10.5 V to 60 V (also depending on the model), and they allow for peak currents well above the maximum continuous ratings. The “Solo” versions feature a single motor control channel while the dual versions (denoted by a “2x” in their names) offer two channels for controlling a pair of motors.
| Solo 30A | Solo 60A | 2x7A | 2x15A | 2x30A | 2x45A ST 2x45A | 2x60A | 2x60AHV | 2x160A | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Motor channels: | 1 | 2 | 2 | |||||||||||
| Operating voltage: | 6 V to 34 V | 6 V to 34 V | 10.5 V to 60 V | |||||||||||
| Continuous output current: | 30 A | 60 A | 7.5 A | 15 A | 30 A | 45 A | 60 A | 60 A | 120 A | |||||
| Peak output current: | 60 A | 120 A | 15 A | 30 A | 60 A | 60 A | 120 A | 120 A | 160 A | |||||
| 5V BEC(1) max current: | 1.2 A | 1.2 A (V5B or later) | 3 A | 3 A | ||||||||||
| Size: | 60 × 32.5 × 23.5 mm | 48 × 42 × 17 mm | 74 × 52 × 17 mm | 100 × 86 × 30 mm | 100 × 86 × 30 mm | 212 × 126 × 50 mm | ||||||||
| Weight: | 130 g | 18 g | 60 g | 295 g | 295 g | 1630 g | ||||||||
1 Battery Eliminator Circuit
The RoboClaws have a USB interface that acts as a virtual serial (COM) port, allowing it to be controlled directly from a computer, and they feature built-in commands for controlling acceleration, deceleration, distance, speed, current sense, voltage limits and more. Several other interface modes are supported by the RoboClaw as well: it can be controlled via TTL serial for use with embedded systems, RC hobby servo pulses for use as an RC-controlled electronic speed control (ESC), or analog voltages for use with potentiometers or analog joysticks.
RoboClaw automatically supports 3.3V or 5V logic levels, travel limit switches, home switches, emergency stop switches, power supplies, braking systems and contactors. Power supplies can be used by enabling the built in voltage clamping control feature. A built-in switching mode BEC supplies 5VDC at up to 1.2 A or 3 A (depending on controller model) for powering user devices.
The RoboClaws can be operated without feedback for open-loop speed control, or they can be used with a variety of feedback types for closed-loop speed or position control. Quadrature encoders with up to 19.6 million pulses per second are supported and can be auto tuned using Ion Studio, which is a free downloadable application. In addition, a wide range of sensor inputs such as potentiometers and absolute encoders are supported. RoboClaw’s closed loop functionality creates absolute control over speed and direction regardless of load changes.
RoboClaw incorporates several protection features including temperature, current, over voltage and under voltage limits. Several user definable settings such as maximum current limit, maximum and minimum battery voltages are provided for more refined control.
| Motor channels: | 1 |
|---|---|
| Control interface: | USB; non-inverted TTL serial (2-way); RC servo pulses; analog voltage1 |
| Minimum operating voltage: | 6 V |
| Maximum operating voltage: | 34 V |
| Continuous output current per channel: | 60 A |
| Peak output current per channel: | 100 A |
| Size: | 60 × 32.5 × 23.5 mm |
|---|---|
| Weight: | 130 g |
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
The RoboClaw Solo motor controllers from Basicmicro (formerly Ion Motion Control) can control a single brushed DC motor using USB serial, TTL serial, RC, or analog inputs. An integrated quadrature decoder make it easy to create a closed-loop speed control system.
No product available!
3-channel brush motor controller module with PWM signal mixing function. It allows you to control three DC motors with a current consumption of up to 15 A per channel
3-channel brush motor controller module with PWM signal mixing function. It allows you to control three DC motors with a current consumption of up to 3 A per channel
No product available!
The UX-52 panel brush motor speed controller is a versatile device with speed adjustment from 90 to 1400 rpm. It offers precise control of motors with an input voltage of 220VAC, featuring a solid construction and a convenient digital display.
No product available!
KAmod Motor Driver is an advanced DC motor controller powered by 6-30 V, enabling power regulation using the PWM method and control of the direction of rotation, compatible with analog and PWM signals from various sources, equipped with overload and thermal protections and soft start and stop functions
The dual-channel KAmod Motor Driver TB6612FNG with MOSFET H-bridges enables precise control of DC and stepper motors with PWM frequency up to 100 kHz. The compact design, wide voltage range, and protections make the module suitable for mobile projects, robotics, and automation.
This L298N module allows independent control of two DC motors or one stepper motor, ideal for robotics and DIY projects. It supports power supplies from 7V to 35V and has a built-in 5V regulator that can power additional circuits. Control is performed via the ENA, ENB, and IN1–IN4 pins, allowing for adjustable rotational direction and speed. The module is equipped with protection diodes and filter capacitors for stable and reliable operation.
An H-bridge capable of controlling one DC motor in both directions or two unidirectional motors at voltages from 4.5 to 44 V and continuous current up to 1.1 A. The module offers three operating modes (PH/EN, IN/IN, half-bridge), built-in current limiting and measurement, and protection against overheating, overload, undervoltage, and reverse polarity. Its compact design, flexible logic power supply (1.8–5.5 V), and simple control make it ideal for robotics, automation, and hobby projects. Pololu 4972
An H-bridge capable of controlling one DC motor in both directions or two unidirectional motors at voltages from 4.5 to 44 V and continuous currents up to 1.3 A. The module offers three operating modes (PH/EN, IN/IN, half-bridge), built-in current limiting and measurement, and protection against overheating, overload, undervoltage, and reverse polarity. Its compact design, flexible logic power supply (1.8–5.5 V), and simple control make it ideal for robotics, automation, and hobby projects. Pololu 4971
This board allows for simultaneous control of two motors with full direction and stopping control, ideal for robotic buggies and educational vehicles. It features built-in short circuit, overload, and overheat protection, as well as a stabilized 3V output to power the micro:bit. The Edge Connector and additional pins allow for easy connection of sensors, switches, and accessories, expanding the project\'s functionality. Programming is supported by dedicated MakeCode blocks and support for the Kitronik 5698 Python.
No product available!
An H-bridge driver that provides bidirectional control of a high-power DC motor with a voltage range of 5-60 V and a continuous current of up to 11 A. The module supports PWM signals up to 100 kHz, features a current measurement (CS) output based on the ACS711 sensor, and features reverse polarity and short-circuit protection. It is compatible with both 3.3 V and 5 V logic, enabling easy integration with popular microcontroller platforms. Ideal for robotics, automation, and DIY projects requiring high performance and reliability. Pololu 2993
FeatherWing expansion board for controlling DC motors, stepper motors, and servo motors, based on the PCA9685 PWM controller and TB6612FNG H-bridge drivers. Adafruit 3243
A compact motor controller designed for the Pimoroni Yukon platform, capable of driving two DC motors or one bipolar stepper motor. The DRV8424P chip provides stable control with a supply voltage of 5 to 17 V and a current of up to 1.6 A continuous per channel. The module offers adjustable current limiting, thermal protection, and error detection. Pimoroni PIM693
No product available!
A powerful controller designed to drive a single brushed DC motor with an encoder in the Pimoroni Yukon system. It offers up to 8 A continuous and 12 A peak current at a supply voltage of 5 to 17 V, making it suitable for demanding robotic projects. The module provides precise control thanks to encoder support and built-in current, temperature, and error sensors. Pimoroni PIM691
Compact module for driving two DC motors, 6.5–37 V, continuous current 12 A per channel, peak 70 A, with protections and status indicators. DFRobot DFR0601
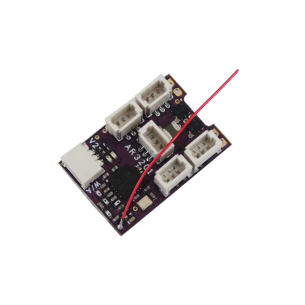
Brushed DC motor ESC with integrated FlySky receiver, designed for remote control of DC motors in RC models and mobile projects, supporting speed and direction control. modAR3201-F2
Dual-channel motor driver module designed for controlling two DC motors or one bipolar stepper motor. The circuit supports motor voltages up to 11 V, works with 3.3 V and 5 V logic systems, and provides output current up to 1.2 A per channel. The design includes dual H-bridges, PWM support, IN / IN and PHASE / ENABLE operating modes, as well as overcurrent and thermal protection. Kamod Motor Driver DRV8835
The RoboClaw Solo motor controllers from Basicmicro (formerly Ion Motion Control) can control a single brushed DC motor using USB serial, TTL serial, RC, or analog inputs. Pololu 3291