
















zł57.79 tax excl.
This compact breakout board is for ROHM’s BD65496MUV motor driver, which offers an operating voltage range of 2 V to 16 V and can deliver a continuous 1.2 A to a single brushed DC motor. Pololu 2960
Pololu - 2960
This compact breakout board is for ROHM’s BD65496MUV motor driver, which offers an operating voltage range of 2 V to 16 V and can deliver a continuous 1.2 A (5 A peak for a few milliseconds) to a single brushed DC motor. The motor driver features variable switching speed, allowing for PWM frequencies up to 500 kHz, two drive mode options, and built-in under-voltage and over-temperature protection; our carrier also adds reverse-voltage protection.
DESCRIPTION
Overview
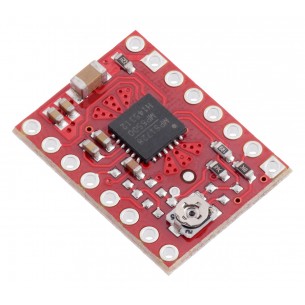
The BD65496MUV from ROHM is a tiny H-bridge motor driver IC that can be used for bidirectional control of one brushed DC motor at 2 V to 16 V. It can supply up to about 1.2 A continuously and can tolerate peak currents up to 5 A for a few milliseconds. The BD65496MUV is a great IC, but its small surface-mount package makes it difficult for the typical student or hobbyist to use; our breakout board makes it easy to use with standard solderless breadboards and 0.1″ perfboards. Since this board is a carrier for the BD65496MUV, we recommend careful reading of the BD65496MUV datasheet (481k pdf). The board ships populated with SMD components, including the BD65496MUV and a reverse battery protection circuit.
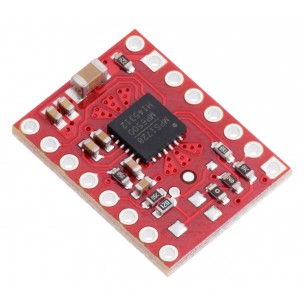
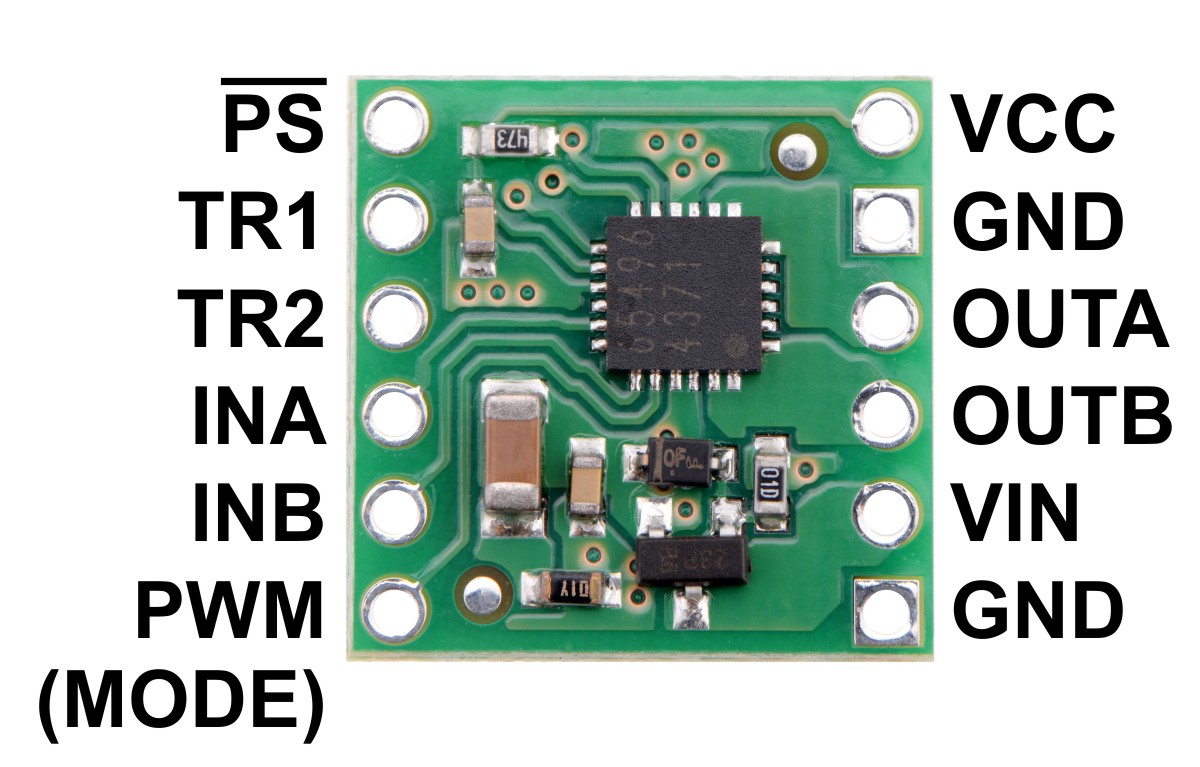
BD65496MUV Single Brushed DC Motor Driver Carrier,
bottom view with dimensions.
Features
Included hardware
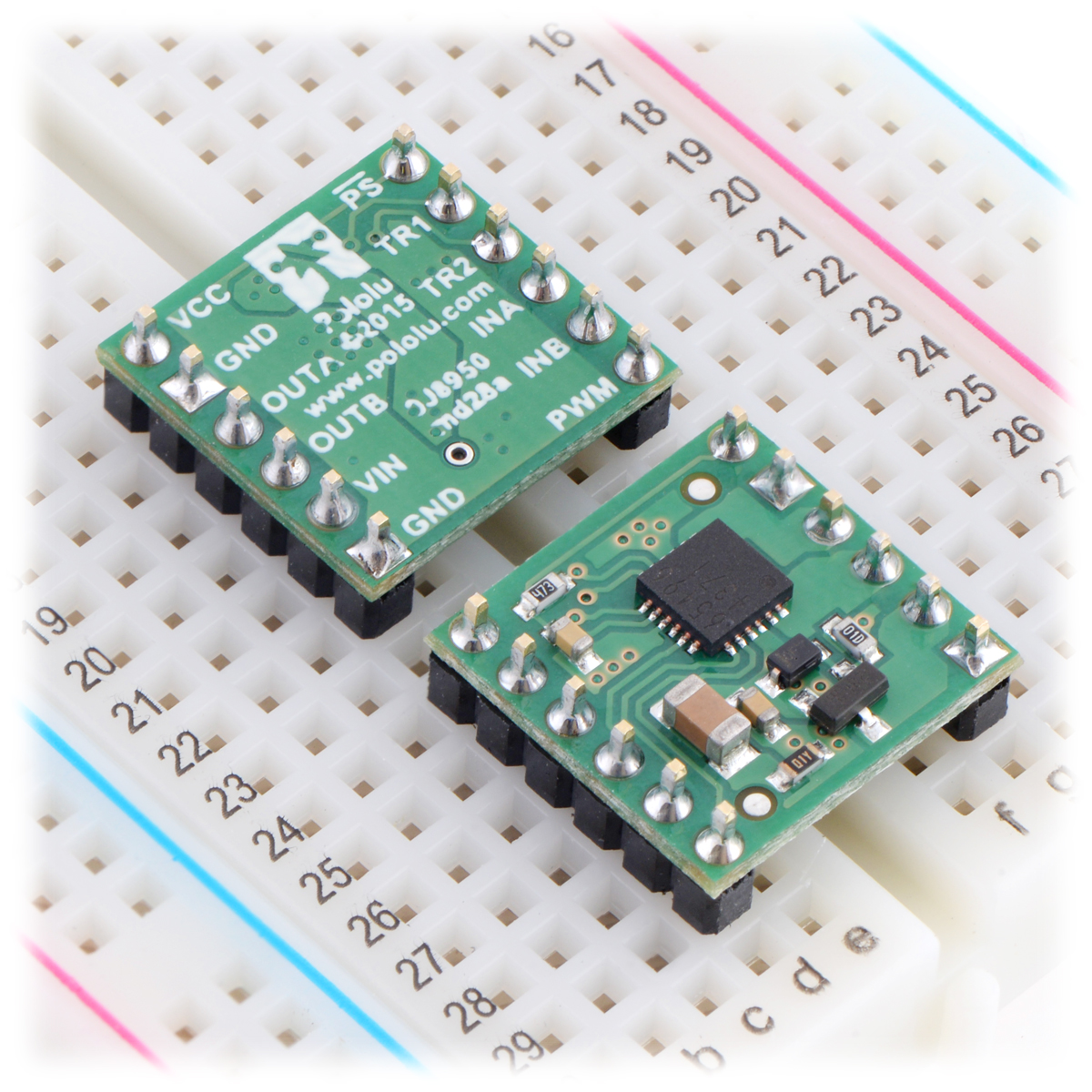
Two 1×6-pin breakaway 0.1″ male headers are included with the BD65496MUV motor driver carrier, which can be soldered in to use the driver with breadboards, perfboards, or 0.1″ female connectors. (The headers might ship as a single 1×12 piece that can be broken in half.) The right picture above shows the two possible board orientations when used with these header pins (parts visible or silkscreen visible). You can also solder your motor leads and other connections directly to the board.
Using the motor driver
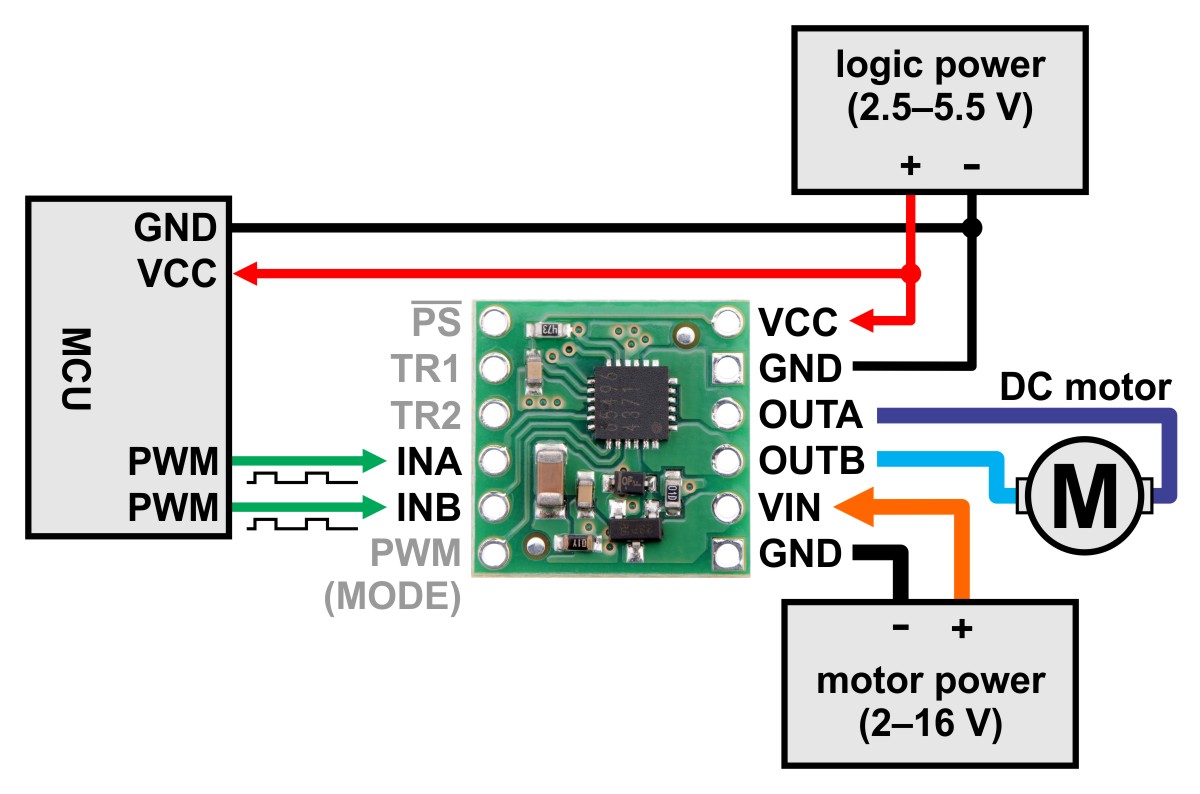
Minimal wiring diagram for connecting a microcontroller
to a BD65496MUV Single Brushed DC Motor Driver Carrier
(default IN/IN mode).
Motor and power connections are made on one side of the board and control connections are made on the other. The driver requires an operating voltage between 2 V and 16 V to be supplied to the reverse-protected power input, VIN, and a logic voltage between 2.5 V and 5.5 V to be supplied to the VCC pin; the logic voltage can typically be supplied by or shared with the controlling device.
The BD65496MUV offers two possible control interface modes: IN/IN and EN/IN. The PWM (MODE) pin is used to select the control interface. If the PWM (MODE) pin is left disconnected or driven low, as shown in the minimal wiring diagram above, the selected interface is IN/IN, which generally requires two PWM signals, one for INA and another for INB. If this pin is driven high, as shown in the wiring diagram below, the selected interface is EN/IN, which turns the INB pin into a “motor direction” input and the INA pin into an enable input that can be supplied with a PWM signal to control speed.

Minimal wiring diagram for connecting a microcontroller
to a BD65496MUV Single Brushed DC Motor Driver Carrier
(EN/IN mode).
The PS (power save) pin can be driven low to put the driver into a low-power state and turn off the motor outputs, which is useful if you want to let the motor coast. The PS pin is pulled high through a 47 kΩ pull-up resistor on the carrier board so that the driver is enabled by default; the quiescent current draw of the board will be dominated by the current through this resistor when the pin is driven low to put the driver to sleep. In most applications, this pin can be left disconnected or can serve primarily as a way to enable coasting. For applications where a low-power mode is desirable, the 47 kΩ pull-up resistor can be removed (this resistor is located right next to the PS pin), or the logic voltage (VCC) for the driver can be dynamically supplied by a digital output of your microcontroller.
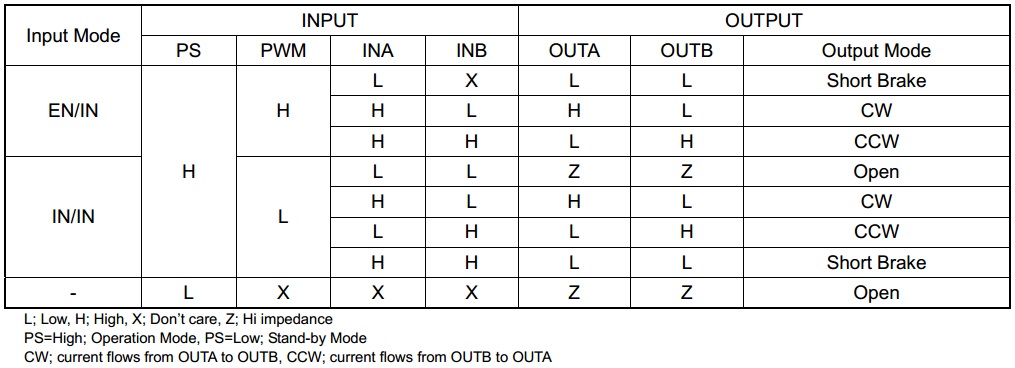
The following truth table (taken directly from the BD65496MUV datasheet) shows how the driver operates:
Pinout
| PIN | Default State | Description |
|---|---|---|
| VIN | Reverse-protected power supply input; supply this pin with 2 V to 16 V. | |
| VCC | 2.5 V to 5.5 V logic power supply connection. Logic supply current draw is typically only a few milliamps at most, so in many applications this pin can optionally be dynamically powered by a microcontroller digital output. | |
| GND | Ground connection points for the motor and logic supplies. The control source and the motor driver must share a common ground. | |
| OUTA | H-bridge output A. | |
| OUTB | H-bridge output B. | |
| PWM (MODE) | LOW | Drive mode selection pin. LOW=IN/IN; HIGH=EN/IN. |
| INA | LOW | Motor control input A (functions like an enable pin in EN/IN mode). |
| INB | LOW | Motor control input B (functions like a direction pin in EN/IN mode). |
| PS | HIGH | Sleep/coast input. Drive low to tri-state the driver outputs and enable power-save mode. |
| TR1 | LOW | Turn-on and turn-off time selection input 1. |
| TR2 | LOW | Turn-on and turn-off time selection input 2. |
All of the driver inputs except PS are internally pulled low through 100 kΩ pull-down resistors. The PS pin is pulled high on the carrier board through a 47 kΩ pull-up resistor that overpowers the driver IC’s internal 300 kΩ pull-down.
The TR1 and TR2 pins control the driver’s turn-on and turn-off time. Both pins are low by default, resulting in a default turn-on time of 150 ns (typical) and a default turn-off time of 50 ns (typical); this allows for PWM frequencies up to 500 kHz. If such a high switching frequency is not required, the TR1 and TR2 inputs can be configured for longer turn-on and turn-off times to help reduce electromagnetic interference (EMI). See the datasheet for more information.
Real-world power dissipation considerations
The BD65496MUV datasheet rates this driver for a maximum continuous current of 1.2 A. In our tests, we found that the chip was able to deliver 1.2 A comfortably over the full operating voltage range, with the driver temperature only approaching the thermal shut down point at the very low end of the motor supply range. At 9 V in, we did not see the driver’s thermal shutdown activate until we pushed the continuous current past 1.5 A for many minutes, but we generally advise against running so close to the limit that the driver overheats. Our tests were conducted at 100% duty cycle with no forced air flow; PWMing the motor will introduce additional heating proportional to the frequency.
SPECIFICATIONS
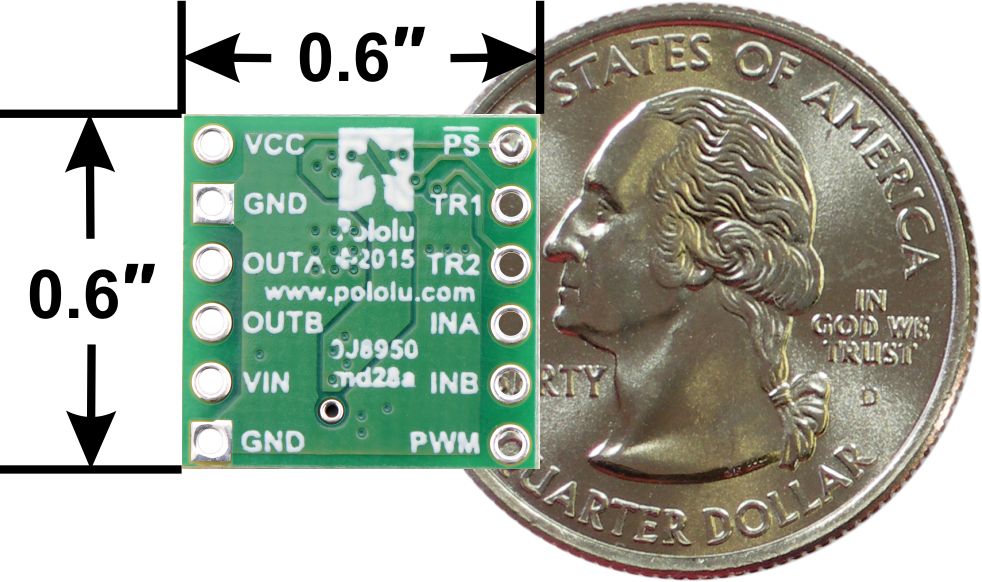
Dimensions
| Size: | 0.6″ × 0.6″1 |
|---|---|
| Weight: | 0.6 g1 |
General specifications
| Motor driver: | BD65496MUV |
|---|---|
| Motor channels: | 1 |
| Minimum operating voltage: | 2 V |
| Maximum operating voltage: | 16 V |
| Continuous output current per channel: | 1.2 A |
| Peak output current per channel: | 5 A2 |
| Maximum PWM frequency: | 500 kHz3 |
| Minimum logic voltage: | 2.5 V |
| Maximum logic voltage: | 5.5 V |
| Reverse voltage protection?: | YES |
Notes:
1 Without included hardware.
2 For no longer than 10 ms; duty cycle < 5%.
3 TR1 and TR2 low.
RESOURCES
File downloads
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
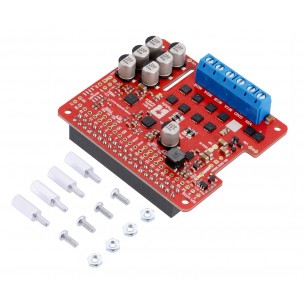
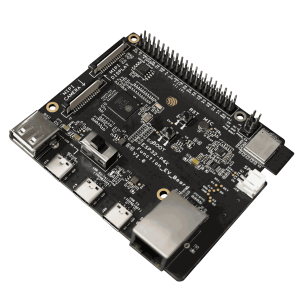
This add-on board makes it easy to control two high-power DC motors with a Raspberry Pi. Its twin discrete MOSFET H-bridges support a wide 6.5 V to 36 Voperating range and are efficient enough to deliver a continuous 14 A without a heat sink. The drivers offer basic current limiting functionality, and they accept ultrasonic PWM frequencies for quieter operation.
HAT module with a driver for two DC motors designed for Raspberry Pi. Motors can be powered with the voltage from 6.5 to 30 V and draw a maximum current of up to 18 A. Pololu 3751
No product available!
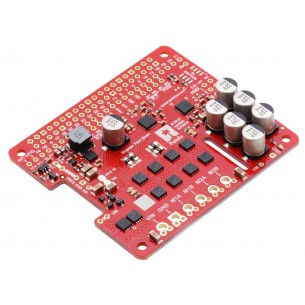
This add-on board makes it easy to control two high-power DC motors with a Raspberry Pi. Its twin discrete MOSFET H-bridges support a wide 6.5 V to 30 Voperating range and are efficient enough to deliver a continuous 18 A without a heat sink. The drivers offer basic current limiting functionality, and they accept ultrasonic PWM frequencies for quieter operation.
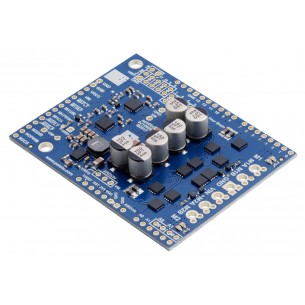
This shield makes it easy to control two high-power DC motors with your Arduino or Arduino-compatible board. Its twin discrete MOSFET H-bridges support a wide 6.5 V to 30 V operating range and are efficient enough to deliver a continuous 18 A without a heat sink.
Pololu Dual G2 High-Power Motor Driver 18v22 is an extension that allows you to control two DC motors designed for Arduino tiles. The motor can be supplied with 6.5 ... 30V voltage and can draw up a maximum current of 22A. Polol 2517
No product available!
Pololu Dual G2 High-Power Motor Driver 24v18 is an extension that allows you to control two DC motors designed for Raspberry Pi. The motors can be supplied with 6.5-36V voltage and can draw a maximum current of 18A. Pololu 3756
No product available!
Pololu Dual G2 High-Power Motor Driver 18v22 is an extension that allows you to control two DC motors designed for Raspberry Pi. The motors can be powered with 6.5-30V and draw up a maximum current of 22A. Pololu 3754
No product available!
DRV8825 Stepper Motor Driver Module for Arduino. It allows you to control two drives, equipped with an XBee connector. DFRobot DRI0023
The stepper motor driver with the MP6500 system allows the bipolar motor to be supplied with current up to 1.5 A per phase, without the use of a heat sink. The system can be supplied with voltage in the range 4.5 ... 35 V. Pololu 2966
MP6500 Stepper Motor Driver Carrier, Digital Current Control
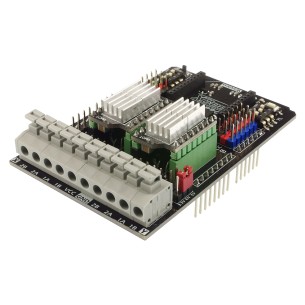
Gravity: IO Expansion & Motor Driver Shield is an Arduino compatible expansion board that provides digital I / O ports, analog I2C, SPI and UART interfaces, as well as a DC motor driver. DFRobot DFR0502
Tic T500 USB Multi-Interface Stepper Motor Controller
Tic T500 USB is a stepper motor driver based on the MP6500 chip. It allows you to control the stepper motor whose voltage on the coil is 4.5-35V, the maximum current per coil is up to 1.5A. The controller can be controlled by: USB, TTL, I2C, RC (PWM model) etc. Pololu 3134
The RoboClaw Solo motor controllers from Basicmicro (formerly Ion Motion Control) can control a single brushed DC motor using USB serial, TTL serial, RC, or analog inputs. An integrated quadrature decoder make it easy to create a closed-loop speed control system.
No product available!
The RoboClaw Solo motor controllers from Basicmicro (formerly Ion Motion Control) can control a single brushed DC motor using USB serial, TTL serial, RC, or analog inputs. Pololu 3291
No product available!
2x1.2A DC Motor Driver is a dual controller of DC motors with a Gravity connector, supplied with 2.5 ... 12V voltage with a maximum current consumption of 1.2A (3.2A peak) per channel. DFRobot DRI0044-A
This compact breakout board is for ROHM’s BD65496MUV motor driver, which offers an operating voltage range of 2 V to 16 V and can deliver a continuous 1.2 A to a single brushed DC motor. Pololu 2960