













zł1,966.34 tax excl.
DC motor driver with an operating voltage from 6 to 60 V and a maximum continuous current of 300 A. It can communicate via USB, UART, RC or analog signal and allows for the implementation of a feedback loop. Pololu 3584
Single-channel DC motor driver with operating voltage from 6 to 60 V and current efficiency up to 300 A. Communication can be via USB port, serial TTL interface, signal from RC receiver or analog input. The controller has a built-in decoder of incremental encoders, potentiometers and absolute encoders, which enable easy implementation of closed-loop control of the engine speed. The module offers many functionalities, including an energy recovery system during engine braking, resistance to sudden changes in rotational speed (at high engine revolutions) and a temperature control system protecting against overheating. It can work with systems with a voltage of 3.3 V and 5 V.
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
The RoboClaw Solo motor controllers from Basicmicro (formerly Ion Motion Control) can control a single brushed DC motor using USB serial, TTL serial, RC, or analog inputs. An integrated quadrature decoder make it easy to create a closed-loop speed control system.
This compact breakout board is for ROHM’s BD65496MUV motor driver, which offers an operating voltage range of 2 V to 16 V and can deliver a continuous 1.2 A to a single brushed DC motor. Pololu 2960
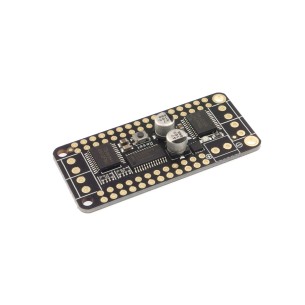
The pad for use with shallow Feather series contains two TB6612 chips that allow you to control DC motors or stepper motors. The I2C interface is used to communicate with the overlay. Adafruit 2927
This discrete MOSFET H-bridge motor driver enables bidirectional control of one high-power DC brushed motor. The small 1.3×0.8″ board supports a wide 6.5V to 40V voltage range and is efficient enough to deliver a continuous 13A without a heat sink. Driver includes reverse-voltage protection along with basic current sensing and current limiting functionality. Pololu 2992
No product available!
This discrete MOSFET H-bridge motor driver enables bidirectional control of one high-power DC brushed motor. The small 1.3″ × 0.8″ board supports a wide 6.5 V to 30 V voltage range and is efficient enough to deliver a continuous 17 A without a heat sink.
No product available!
Atmel ATmega32U4 microcontroller comes preloaded with an Arduino-compatible bootloader, and the board includes dual motor drivers that can deliver 1.7 A per channel to two brushed DC motors. Pololu 3119
The core of a small robot, either as an auxiliary controller atop a Raspberry Pi base or as a complete control solution on its own. Its Atmel ATmega32U4 microcontroller comes preloaded with an Arduino-compatible bootloader. This version does not include any through-hole components or connectors, allowing for customized assembly or standalone use. Pololu 3118
This discrete MOSFET H-bridge motor driver enables bidirectional control of one high-power DC brushed motor. The small 1.3″ × 0.8″ board supports a wide 6.5 V to 30 V voltage range and is efficient enough to deliver a continuous 25 A without a heat sink.
No product available!
This discrete MOSFET H-bridge motor driver enables bidirectional control of one high-power DC brushed motor. The small 1.3″ × 0.8″ board supports a wide 6.5 V to 40 V voltage range and is efficient enough to deliver a continuous 21 A without a heat sink.
This add-on board enables a Raspberry Pi B+, Pi A+, Pi 2 or Pi 3 to drive a pair of brushed DC motors. Its dual MC33926 motor drivers operate from 5 V to 28 V and can deliver a continuous 3 A (5 A peak) per motor. The default pin mappings make it easy to get started using our provided software, but the board also exposes most of the driver chips’ I/O pins for more specialized applications.
No product available!
This compact breakout board for Maxim’s MAX14870 motor driver offers a wide operating voltage range of 4.5 V to 36 V and can deliver a continuous 1.7 A (2.5 A peak) to a single brushed DC motor. It features a simple two-pin speed/direction interface and built-in protection against reverse-voltage, under-voltage, over-current, and over-temperature.
Two-channel DC motor driver based on the HR9933 circuit. It allows you to control the movement of drives with a supply voltage of up to 10 V and power consumption up to 1.5 A. DFRobot DRI0040
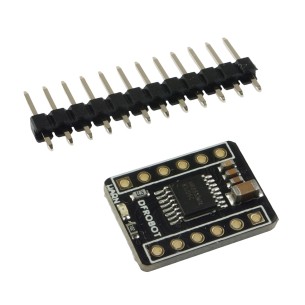
Single-channel DC motor driver that can control the movement of the drive with a supply voltage of up to 36 V and a current consumption of up to 15 A. Controlled by a PWM signal. DFRobot DRI0042
Ultra small Dual DC motor driver for some room limited projects. UVLO (Under Voltage Latch-Out) features a safe guard for your system. DRI0041
The power module together with the engine controller has been specially created for the Romi Chassis chassis. With its help, we will supply all components of our construction and we will be able to control the engines responsible for the movement of the chassis. Pololu 3543
Two-channel DC motor driver communicating via UART, SPI or I2C interface. It can control the movement of 3 to 11V motors with a maximum continuous current of 1.2A per channel. SparkFun ROB-13911
No product available!
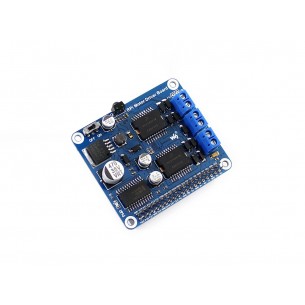
Raspberry Pi Expansion Board, DC Motor / Stepper Motor Driver
DC motor driver with an operating voltage from 6 to 60 V and a maximum continuous current of 300 A. It can communicate via USB, UART, RC or analog signal and allows for the implementation of a feedback loop. Pololu 3584