


- Out-of-Stock
- dwukanałowy sterownik silników DC")
- dwukanałowy sterownik silników DC")
- dwukanałowy sterownik silników DC")
- dwukanałowy sterownik silników DC - zwartość zestawu")
- dwukanałowy sterownik silników DC zamknięty w obudowie")
The RoboClaw motor controller can control a pair of brushed DC motors using USB serial, TTL serial, RC or analog inputs. Integrated dual quadrature decoders make it easy to create a closed-loop speed control system. This version can supply a continuous 7.5 A per channel (15 A peak). Pololu 3284
The RoboClaw from Ion Motion Control (formerly Orion Robotics) is an efficient, versatile, dual-channel synchronous regenerative motor controller. It can supply two brushed DC motors with 7.5 A, 15 A, 30 A, 45 A, or 60 A continuous (depending on the model) at voltages from 6 V to 34 V, and it allows for peak currents up to twice the maximum continuous rating.
The RoboClaw features dual quadrature decoding capability. A built-in PID routine can be used for closed-loop speed control, maintaining motor speeds even if the load varies, or the encoder counts and speeds can be read directly from the RoboClaw for use with an external control system. Analog feedback is also supported for closed-loop position control.
The RoboClaw has a USB interface that acts as a virtual serial (COM) port, allowing it to be controlled directly from a computer. Several other interface modes are supported by the RoboClaw as well: it can be controlled via TTL serial for use with an embedded system, RC hobby servo pulses for use as an RC-controlled electronic speed control (ESC), or analog voltages for use with potentiometers or analog joysticks.
RoboClaw versions V5 and above have USB Micro-B connectors; older USB RoboClaws had a USB Mini-B connector.
This RoboClaw 2x7A (V5B) is a slightly improved replacement for the 2x7A (V5). Specifically, the V5 linear BEC regulator has been replaced by a higher-power switching regulator on the V5B that can deliver up to 1.2 A at 5 V, and this product now includes an optional case. In all other respects, the new version is functionally identical to the previous one.
The board size is the same and the locations of the key interface elements (e.g. buttons, terminal blocks, header pins, USB connector, and mounting holes) are unchanged, but some of the components (e.g. the large power capacitors) have changed, which could affect how the new controller works as a replacement for the V5 in designs with very tight space constraints.
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Starter kit containing Raspberry Pi 4B 4 GB and all necessary accessories: 32 GB microSD memory card with Rasberry Pi OS system, ruler, Ethernet cable and official accessories: housing, cooling kit, power supply and HDMI cable
No product available!
Starter kit containing Raspberry Pi 4B 8 GB and all necessary accessories: 32 GB microSD memory card with Rasberry Pi OS system, ruler, Ethernet cable and official accessories: housing, cooling kit, power supply and HDMI cable
No product available!
MP3 player module controlled by the I2C interface. It is based on a class D amplifier with a power of 1.4 W. The board has a 3.5 mm headphone output and an 8 Ω speaker connector. Audio files are saved on the microSD card. SparkFun DEV-16892
No product available!
Jumper designed for goldpin connectors with a pitch of 1.27 mm (0.05 inch). Black colour
No product available!
Multifunctional robot with 2WD chassis with a controller in the form of a micro:bit educational module. It is a universal mobile platform that can track the line and find and avoid obstacles. Waveshare KitiBot for micro:bit Acce B
No product available!
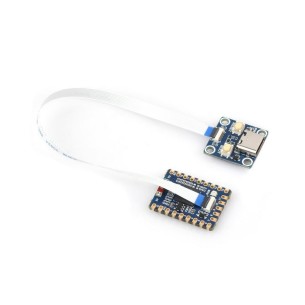
Extension module for Alchitry Au and Alchitry Au+ sets. It enables communication within USB 3.0 with a speed of up to 200 MB/s. SparkFun DEV-17526
No product available!
Black microHDMI-HDMI cable with a length of 1 meter. Compliant with HDMI v1.4 specification. Lanberg CA-HDMI-12CC-0010-BK
No product available!
Black microHDMI-HDMI cable with a length of 1 meter. Compliant with HDMI v1.4 specification. Lanberg CA-HDMI-12CC-0018-BK
No product available!
A stand that uses the phenomenon of magnetic levitation. It can lift objects weighing up to 300 g. Power via USB with 5V
No product available!
A stand that uses the phenomenon of magnetic levitation. It can lift objects weighing up to 500 g. Power via USB with 5V
No product available!
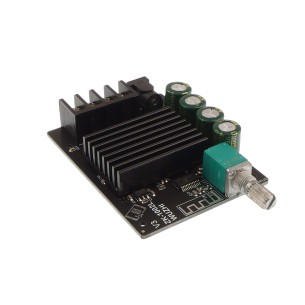
Audio module with a high-power stereo amplifier equipped with a Bluetooth 5.0 module, which enables wireless music playback. It can handle speakers with a power of 50 W to 300 W and an impedance of 4 Ω to 8 Ω. DFRobot DFR0777
No product available!
Kit for building an intelligent JetBot robot based on Jetson Nano. It consists of Jetson Nano with 2GB RAM, expansion module, WiFi card, camera, motors, housing and a set of mounting screws. JetBot AI Kit (M2 WiFi) 2GB
No product available!
Kit for building an intelligent JetBot robot based on Jetson Nano. It consists of Jetson Nano with 2GB RAM, expansion module, WiFi card, camera, motors, housing and a set of mounting screws. JetBot AI Kit (USB WiFi) 2GB
No product available!
Kit for building an intelligent JetBot robot based on Jetson Nano. It consists of Jetson Nano with 4GB RAM, expansion module, WiFi card, camera, motors, housing and a set of mounting screws. JetBot AI Kit (USB WiFi) 4GB
No product available!
Kit containing Raspberry Pi Pico and Raspberry Pi 4B 4 GB. The kit also includes the necessary connectors, cables, power supply and housing - heat sink
No product available!
Kit containing Raspberry Pi Pico and Raspberry Pi 4B 4 GB. The kit also includes the necessary connectors, cables, power supply and housing - heat sink
No product available!
The RoboClaw motor controller can control a pair of brushed DC motors using USB serial, TTL serial, RC or analog inputs. Integrated dual quadrature decoders make it easy to create a closed-loop speed control system. This version can supply a continuous 7.5 A per channel (15 A peak). Pololu 3284