


















zł61.29 tax excl.
This tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 700:1 plastic planetary gearbox. The entire assembly has a diameter of just 6 mm (0.24″) and an extremely light weight of 1.3 g (0.046 oz), making it a great actuator for miniature robots and very small mechanisms.
These tiny brushed DC gearmotors have a diameter of just 6 mm and weigh just over a gram, which makes them great actuators for miniature robots and very small mechanisms. They consist of a coreless motor fastened to a planetary gearbox by a small clip. The gears are made from liquid crystal polymers (LCPs), and gearbox’s nylon output shaft is compatible with our 14 mm wheels. Three gear ratios are available:
Note: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. For these gearboxes, the recommended upper limit for instantaneous torque is 3.5 oz-in (250 g-cm); we strongly advise keeping applied loads well under this limit. Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
The intended nominal operating voltage for these motors is 3 V to 6 V, though in general, these kinds of motors can be used at voltages outside this range (rotation typically starts between 0.2 V and 0.3 V). Lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor. When operating at 3 V, the free-run speed, stall torque, and stall current will all be approximately half of what they are at 6 V as these specifications scale roughly linearly with voltage.
Since the gearmotor’s output shaft is nylon, there can be small variances in the diameter from unit to unit. These variations might cause press-fit attachments like our 14 mm wheel to fit loosely in some instances. If you experience a loose fit, you could try swapping wheels or using a small dab of glue to help hold the wheel on.
The following diagram shows the micro plastic gearmotor dimensions in mm. The planetary gearbox has a D-shaped plastic output shaft, which is 2 mm in diameter with a section that is flattened by 0.5 mm. The “D” portion of the shaft is 2.5 mm long. The motor measures 6 mm in diameter and 9.3 mm in length, and the gearbox length, labeled “L” in the diagram below, depends on the gear ratio.

These motors originally shipped with leads that extended approximately 2 cm (0.8″) from the back of the motor, but we began transitioning to shipping units with much longer leads (approximately 12.5 cm, or 5″) in January, 2017. These leads are pre-stripped and unterminated (i.e. they do not end in a connector).
| Size: | 6D × 21L mm |
|---|---|
| Weight: | 1.3 g |
| Shaft diameter: | 2 mm |
| Gear ratio: | 700:1 |
|---|---|
| Free-run speed @ 6V: | 90 rpm |
| Free-run current @ 6V: | 45 mA |
| Stall current @ 6V: | 400 mA |
| Stall torque @ 6V: | 12 oz·in |
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Compact and complete robot controller, containing the ATmega328P AVR microcontroller (with 32 KB of Flash memory and 2 KB of RAM memory) and a two-channel DC motor driver. Pololu 1220
Microcontroller board based on the ATmega328P
DRV8835 Dual Motor Driver Carrier
This tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 26:1 plastic planetary gearbox. The entire assembly has a diameter of just 6 mm (0.24″) and an extremely light weight of 1.2 g (0.042 oz), making it a great actuator for miniature robots and very small mechanisms.
Key specs at 6 V: 2500 RPM and 35 mA free-run, 1.5 oz-in (0.1 kg-cm) and 400 mA stall.
No product available!
Solarbotics GM6 120:1 Mini Gear Motor Offset Output
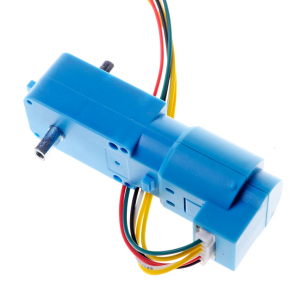
A small motor with a plastic gear 120:1, operating voltage 4.5 V, current consumption from 0.08 A to 0.8 A, speed 120 RPM and a maximum torque of 1.4 kg*cm. Pololu 1122
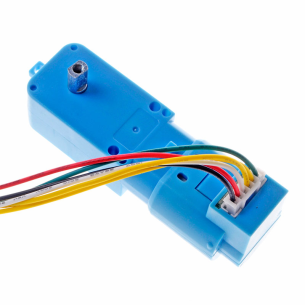
DC motor with plastic gear 1:48. Equipped with an incremental encoder with Hall sensors.
A small motor with a plastic 120:1 gear, the output shaft at an angle of 90°, operating voltage 4.5 V, current consumption from 0.08 A to 0.8 A, speed 120 RPM and a maximum torque of 1.4 kg*cm. Pololu 1123
DC motor equipped with a plastic gear 48:1 with a cut shaft on both sides and an additional shaft for connecting an encoder
No product available!
DAGU gearmotors; 4.5V with a no load current of 190mA while possessing a gearbox ratio of 48:1 and a wheel speed of 140 RPM unloaded. axis. ROB-13302
No product available!
This tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 26:1 plastic planetary gearbox. The entire assembly has a diameter of just 6 mm (0.24″) and an extremely light weight of 1.2 g (0.042 oz), making it a great actuator for miniature robots and very small mechanisms.
Key specs at 6 V: 2500 RPM and 35 mA free-run, 1.5 oz-in (0.1 kg-cm) and 400 mA stall.
No product available!
Solarbotics GM10 81:1 Geared Pager Motor
Solarbotics GM9 143:1 Gear Motor 90 deg. Output
Solarbotics GM8 143:1 Gear Motor Offset Output
Solarbotics GM2 224:1 Gear Motor Offset Output
DC motor with 1:84 planetary gear with a supply voltage from 6 to 24 V and a rotational speed of 140 RPM. Maximum current consumption up to 1.3 A. SparkFun ROB-15277
DC motor with plastic gear 1:48. Equipped with an incremental encoder with Hall sensors.
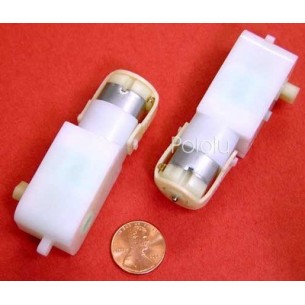
This compact, inexpensive plastic gearmotor (brushed DC motor with a 120:1 reduction gearbox) is well suited for use in small robots. While intended for operation at 4.5 V, it should run comfortably in the 3 V to 6 V range.
DC motor with 1:48 plastic gearbox and double-sided shaft. Equipped with incremental encoder with Hall sensors. Includes bracket, mounting hardware and cord
This compact, inexpensive plastic gearmotor (high-power brushed DC motor with a 120:1 reduction gearbox) is well suited for use in small robots. While intended for operation at 4.5 V, it should run comfortably in the 3 V to 6 V range.
This tiny, cylindrical gearmotor consists of a coreless brushed DC motor and a 700:1 plastic planetary gearbox. The entire assembly has a diameter of just 6 mm (0.24″) and an extremely light weight of 1.3 g (0.046 oz), making it a great actuator for miniature robots and very small mechanisms.