

 - 9DoF module with MPU-9255 chipset - accelerometer, magnetometer, gyroscope")
 - 9DoF module with MPU-9255 chipset - accelerometer, magnetometer, gyroscope")

zł49.52 tax excl.
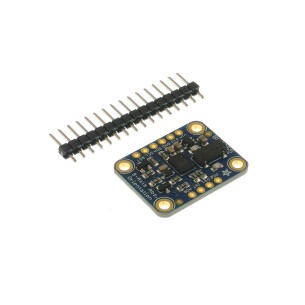
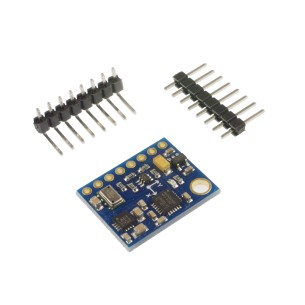
GY-9255 is a 9 Degrees of Freedom (9DoF) module with the InvenSense MPU-9255 chip. It has a built-in gyroscope, accelerometer and magnetometer
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
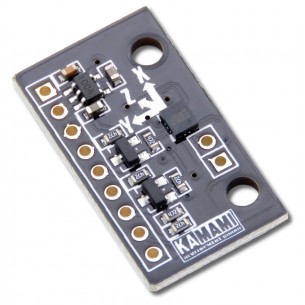
MEMS accelerometer, magnetometer and gyroscope on a single die with a high speed ARM Cortex-M0 based processor
KAmodLSM303C is a module with the MEMS LSM303C chip from STMicroelectronics. The chip has a digital signal output (I2C or SPI bus) and allows measurement of accelerations and magnetic field values in three axes
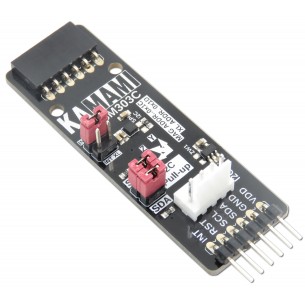
KAmodLSM6DS3 is a module that allows measurement of acceleration and angular velocity values. It has a built-in voltage stabilizer and level translators on SDA / SCL lines, thanks to which it can be used in 2.5-5.5V voltage systems
Versatile 9DOF sensor with accelerometer, magnetometer and gyroscope, supporting I²C and SPI interfaces, enabling precise measurement of motion, orientation and temperature, with easy integration with Arduino and microcontrollers. Adafruit 3387
The Digilent Pmod NAV uses the LSM9DS1 3-axis accelerometer, 3-axis gyroscope, 3-axis magnetometer, plus the LPS25HB digital barometer to provide users with 10-DOF functionality. Digilent 410-326
No product available!
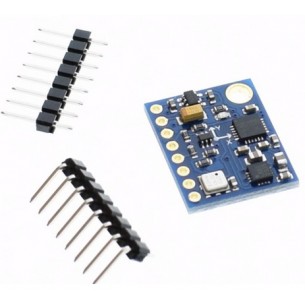
The GY-87 module is composed of a module with MPU6050, QMC5883L and BMP180 sensors, allowing the measurement of traffic in nine axes and the measurement of atmospheric pressure. The module has a built-in 3.3 V voltage stabilizer
No product available!
GY-86 10 Degrees of Freedom Flight Control Sensor Module with MPU6050, HMC5883L and MS5611 sensors on a single board. With the help of this module , you can read the values from its on-board 3 axis gyroscope , 3 axis accelerometer ,3 axis magnetic field and air pressure as well. The module has a built-in 3.3V voltage stabilizer. modGY-86
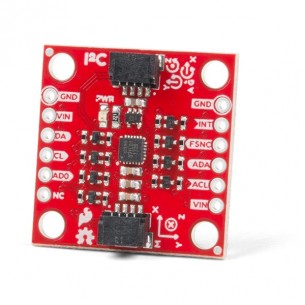
Sensor module for use in the area of virtual reality (VR). It was based on the BNO080 chip, which integrates the accelerometer, gyroscope and magnetometer with the ARM Cortex M0+ microcontroller. SparkFun SEN-14686
No product available!
A module with an acceleration and rotational speed sensor based on the MPU-6050 system. It communicates via the I2C interface. DFRobot SEN0142
No product available!
Module with 9-axis IMU ICM-20948 sensor. The chip is an integrated 3-axis accelerometer, gyroscope and magnetometer and a digital motion processor DMP (Digital Motion Processor). Communication via I2C or SPI. SparkFun SEN-15335
Module with 6-axis BMI160 motion sensor (accelerometer and gyroscope) with 16-bit data resolution. It is supplied with the voltage in the range from 3.2 to 6 V. I2C communication. DFRobot SEN0250
Module with 6-axis IMU sensor MPU6886, which combines a 3-axis accelerometer and a 3-axis gyroscope. M5Stack U095
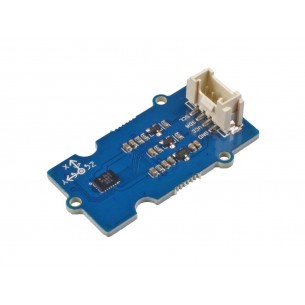
The module with the ADIS16470 chip, which combines a 3-axis accelerometer and a gyroscope. The board is equipped with a Grove connector and communicates via the I2C or SPI interface. Seeed Studio 101020672
No product available!
Module with a 6-axis BMI088 sensor that combines an accelerometer and a gyroscope. The board is equipped with a Grove connector and communicates via I2C. Seeed Studio 101020584
No product available!
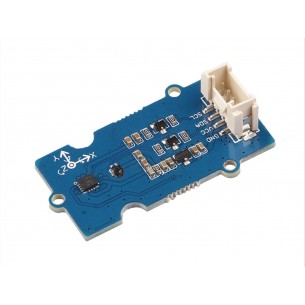
Module with a 9-axis IMU sensor, which combines an accelerometer and a gyroscope (ICM20600 system) and a magnetometer (AK09918 system). The board is equipped with a Grove connector and communicates via the I2C interface. Seeed Studio 101020585
Module with LSM6DS3 sensor that combines a 3-axis accelerometer and a 3-axis gyroscope. The board is equipped with a Grove connector and communicates via the I2C interface. Seeed Studio 105020012
Compact 9DOF IMU sensor with accelerometer, gyroscope and magnetometer, supporting advanced data fusion with Arm Cortex M0 processor and CEVA SH-2 software, offering I²C, SPI and UART-RVC interfaces and a wide range of functions for precise motion and orientation analysis. Adafruit 4754
GY-9255 is a 9 Degrees of Freedom (9DoF) module with the InvenSense MPU-9255 chip. It has a built-in gyroscope, accelerometer and magnetometer