











 - z obudową - widok na złącza")




zł614.72 tax excl.
The UM7 orientation sensor from Redshift Labs is an Attitude and Heading Reference System (AHRS) that contains a three-axis accelerometer, rate gyro, and magnetometer. It combines this data using an Extended Kalman Filter to produce attitude and heading estimates.
Redshift Labs is now manufacturing and supporting the UM7-LT and UM7 orientation sensors (which were originally developed by CH Robotics). Some components have been updated on these versions of the sensors, and the UM7-LT now ships with a conformal coating, but the sensors should otherwise be functionally identical to the previous versions.
The UM7 orientation sensor is a third-generation Attitude and Heading Reference System (AHRS) from Redshift Labs that produces attitude and heading estimates from triaxial accelerometer, rate gyro, and magnetometer data. Unlike a typical inertial measurement unit (IMU), which only provides raw sensor readings, the UM7 features an onboard microcontroller that combines sensor data using a sophisticated Extended Kalman Filter (EKF) to generate orientation estimates 500 times a second.
Two versions of the UM7 are available: the UM7 orientation sensor, which includes an enclosure, and the UM7-LT, which does not. The two versions are functionally equivalent, and both include a cable.
The UM7 features a number of improvements over its predecessor, the UM6, including higher gyro bias stability and lower noise, a new communication architecture for improved flexibility, optional NMEA packet transmission, UTC time-synchronization with external GPS, and support for third-order temperature compensation on all sensors. It takes advantage of newer MEMS (micro-electro-mechanical systems) technology that allows it to offer better performance at a lower price.
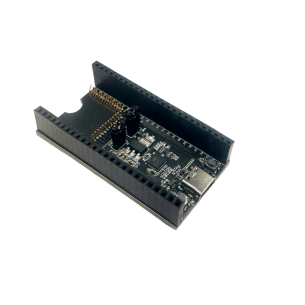
Connections for power and TTL serial communication can be made to the UM7 through a polarized five-pin male connector on one side, which mates with an included cable assembly. A pair of six-pin expansion headers on the other side of the board provide additional connectivity options, including an alternative SPI interface and a secondary serial interface that can be connected to an external GPS module (like ourLS20031 GPS receiver). Additional cable assemblies for the expansion headers are not included.
You can use a general-purpose USB-to-TTL-serial adapter, such as our CP2104 carrier, to connect the UM7 to your computer. You can then use the Redshift Serial Interface (available in the “Resources” tab) to configure the sensor, and view and log data in real-time.
Product #2764 is the UM7 orientation sensor with an enclosure.
We carry several inertial measurement and orientation sensors. The table below compares their capabilities:
| Product Name | Sensors | Estimation | Other | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Gyros (3x) | Accels (3x) | Mag (3x) | Altitude | Roll | Pitch | Yaw | Quaternion | Enclosure | |
| Pololu MinIMU-9 v5 |  |
|
|
||||||
| Pololu AltIMU-10 v5 | |
|
|
|
|||||
| Redshift Labs UM7-LT Orientation Sensor | |
|
|
|
|
|
|
||
| Redshift Labs UM7 Orientation Sensor | |
|
|
|
|
|
|
|
|
| Size: | 1.09″ × 1.12″ × 0.37″1 |
|---|---|
| Weight: | 7.5 g2 |
| Interface: | TTL serial, SPI |
|---|---|
| Minimum operating voltage: | 4 V |
| Maximum operating voltage: | 5.5 V |
| Maximum logic voltage: | 3.3 V3 |
| Axes: | pitch (x), roll (y), and yaw (z) |
| Measurement range: | ±2000°/s (gyro) ±8 g (accelerometer) ±12 gauss (magnetometer) |
| Supply current: | 50 mA |
| Case/enclosure: | Y |
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
The UM7-LT orientation sensor from Redshift Labs is an Attitude and Heading Reference System (AHRS) that contains a three-axis accelerometer, rate gyro, and magnetometer. It combines this data using an Extended Kalman Filter to produce attitude and heading estimates. This LT version of the UM7 does not have an enclosure.
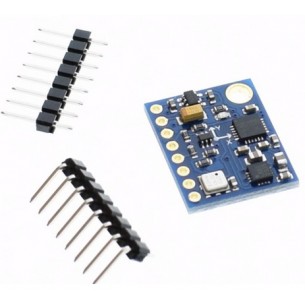
The GY-87 module is composed of a module with MPU6050, QMC5883L and BMP180 sensors, allowing the measurement of traffic in nine axes and the measurement of atmospheric pressure. The module has a built-in 3.3 V voltage stabilizer
No product available!
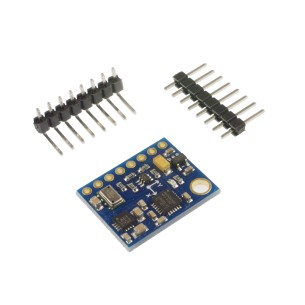
GY-86 10 Degrees of Freedom Flight Control Sensor Module with MPU6050, HMC5883L and MS5611 sensors on a single board. With the help of this module , you can read the values from its on-board 3 axis gyroscope , 3 axis accelerometer ,3 axis magnetic field and air pressure as well. The module has a built-in 3.3V voltage stabilizer. modGY-86
Sensor module for use in the area of virtual reality (VR). It was based on the BNO080 chip, which integrates the accelerometer, gyroscope and magnetometer with the ARM Cortex M0+ microcontroller. SparkFun SEN-14686
No product available!
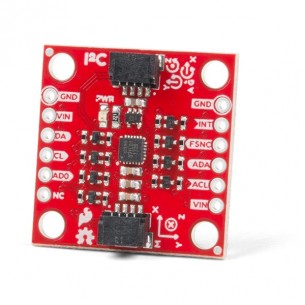
A module with an acceleration and rotational speed sensor based on the MPU-6050 system. It communicates via the I2C interface. DFRobot SEN0142
No product available!
Module with 9-axis IMU ICM-20948 sensor. The chip is an integrated 3-axis accelerometer, gyroscope and magnetometer and a digital motion processor DMP (Digital Motion Processor). Communication via I2C or SPI. SparkFun SEN-15335
Module with 6-axis BMI160 motion sensor (accelerometer and gyroscope) with 16-bit data resolution. It is supplied with the voltage in the range from 3.2 to 6 V. I2C communication. DFRobot SEN0250
Module with 6-axis IMU sensor MPU6886, which combines a 3-axis accelerometer and a 3-axis gyroscope. M5Stack U095
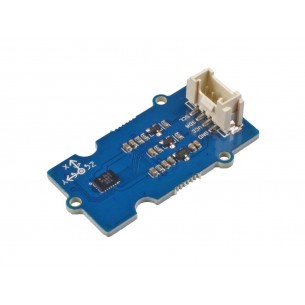
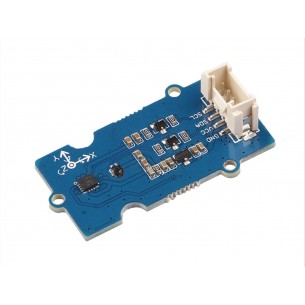
The module with the ADIS16470 chip, which combines a 3-axis accelerometer and a gyroscope. The board is equipped with a Grove connector and communicates via the I2C or SPI interface. Seeed Studio 101020672
No product available!
Module with a 6-axis BMI088 sensor that combines an accelerometer and a gyroscope. The board is equipped with a Grove connector and communicates via I2C. Seeed Studio 101020584
No product available!
Module with a 9-axis IMU sensor, which combines an accelerometer and a gyroscope (ICM20600 system) and a magnetometer (AK09918 system). The board is equipped with a Grove connector and communicates via the I2C interface. Seeed Studio 101020585
Module with LSM6DS3 sensor that combines a 3-axis accelerometer and a 3-axis gyroscope. The board is equipped with a Grove connector and communicates via the I2C interface. Seeed Studio 105020012
Compact 9DOF IMU sensor with accelerometer, gyroscope and magnetometer, supporting advanced data fusion with Arm Cortex M0 processor and CEVA SH-2 software, offering I²C, SPI and UART-RVC interfaces and a wide range of functions for precise motion and orientation analysis. Adafruit 4754
10 DoF module with ADXL345 accelerometer, HMC5883L magnetometer, ITG-3205 gyroscope and BMP280 barometer. Communication via the I2C interface. DFRobot SEN0140
No product available!
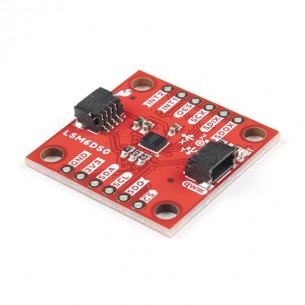
Module with 6-axis IMU LSM6DSO sensor, which combines a 3-axis accelerometer and gyroscope, as well as a 9kB FIFO buffer and event handling functions. Communicates via I2C or SPI. SparkFun SEN-18020
Module with 9-axis IMU ICM-20948 sensor. The system is an integrated 3-axis accelerometer, gyroscope and magnetometer and a digital motion processor DMP (Digital Motion Processor). Communication via I2C. Pimoroni PIM448
No product available!
Module with 9-axis IMU sensor BNO055. It has a built-in processing chip that returns orientation in 3D space. Communicates via I2C. Adafruit 4646
No product available!
The UM7 orientation sensor from Redshift Labs is an Attitude and Heading Reference System (AHRS) that contains a three-axis accelerometer, rate gyro, and magnetometer. It combines this data using an Extended Kalman Filter to produce attitude and heading estimates.