













zł15.65 tax excl.
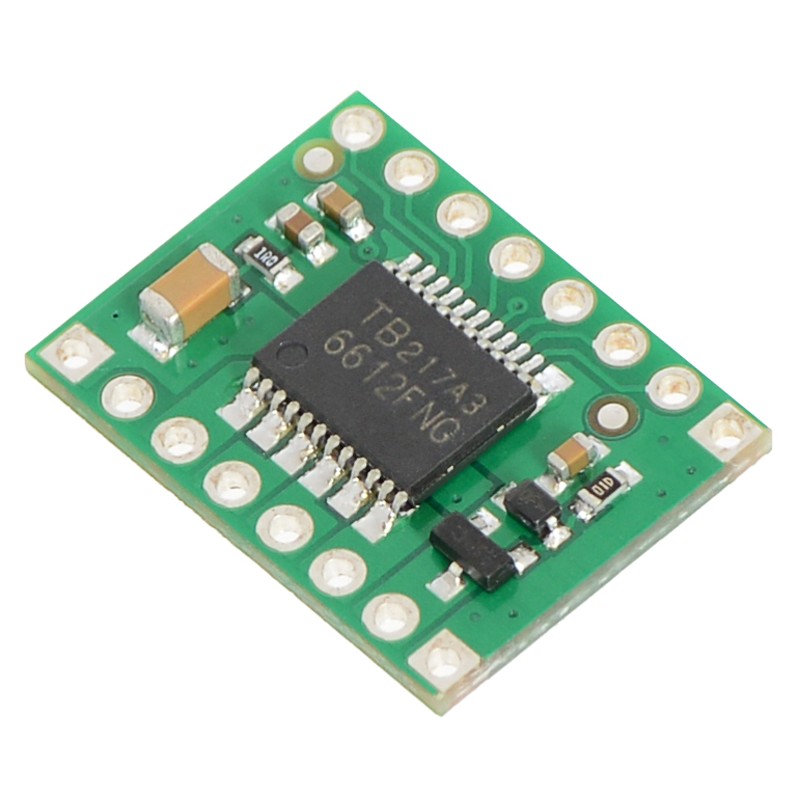
TB6612FNG Dual Motor Driver Carrier
TB6612FNG Dual Motor Driver Carrier
This tiny board is an easy way to use Toshiba’s TB6612FNG dual motor driver, which can independently control two bidirectional DC motors or one bipolar stepper motor. A recommended motor voltage of 4.5 – 13.5 V and peak current output of 3 A per channel (1 A continuous) make this a great motor driver for low-power motors.
 |
The TB6612FNG (308k pdf) is a great dual motor driver that is perfect for interfacing two small DC motors such as our micro metal gearmotors to a microcontroller, and it can also be used to control a single bipolar stepper motor. The MOSFET-based H-bridges are much more efficient than the BJT-based H-bridges used in older drivers such as the L298N and Sanyo’s LB1836M, which allows more current to be delivered to the motors and less to be drawn from the logic supply (the LB1836 still has the TB6612 beat for really low-voltage applications). Our little breakout board gives you direct access to all of the features of the TB6612FNG and adds power supply capacitors and reverse battery protection on the motor supply (note: there is no reverse protection on the Vcc connection).
 |
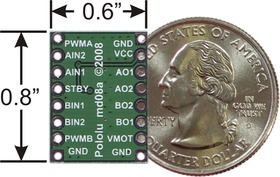
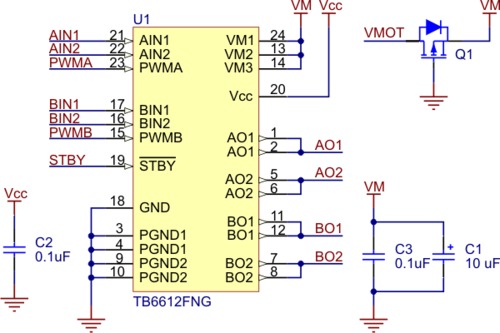
In a typical application, power connections are made on one side of the board and control connections are made on the other. All of the control inputs are internally pulled low. Each of the two motor channels has two direction control pins and a speed control pin that accepts a PWM input with a frequency of up to 100 kHz. The STBY pin must be driven high to take the driver out of standby mode.
 |
| TB6612FNG dual motor driver carrier on a breadboard. |
|---|
The distance between the header rows on the PCB is 0.1" smaller than a standard 0.6" DIP package (e.g. the Baby Orangutan), but the pin spacing allows it to conveniently fit in 0.1" breadboards and perfboards.
For a more advanced motor controller based on this driver, please consider the qik 2s9v1 dual serial motor controller. For a robot controller based on this driver, please consider the Baby Orangutan, Orangutan SV-328, Orangutan SVP-324, and 3pi robot, which connect the TB6612 to a user-programmable AVR microcontroller.
The TB6612 motor driver used on the carrier board has a peak current rating of 3 A per channel. The peak ratings are for quick transients (e.g. when a motor is first turned on), and the continuous rating of 1 A is dependent on various conditions, such as the ambient temperature. The actual current you can deliver will depend on how well you can keep the motor driver cool. The carrier’s printed circuit board is designed to draw heat out of the motor driver chip, but performance can be improved by adding a heat sink.
This product can get hot enough to burn you long before the chip overheats. Take care when handling this product and other components connected to it.
 |
Note: 16 male header pins are included but not soldered onto the boards. No printed documentation is shipped with these items; please see the TB6612FNG datasheet in the resources tab for more information about the motor driver.
 |
Pololu 42x19mm Wheel and Encoder Set |
 |
Pololu Ball Caster with 3/8" Metal Ball |
 |
Pololu Micro Metal Gearmotor Bracket Extended Pair |
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Miniature medium-power, 6 V brushed DC motor with a 51.45:1 metal gearbox. It has a cross section of 10 × 12 mm, and the D-shaped gearbox output shaft is 9 mm long and 3 mm in diameter. Pololu 2365
No product available!
10:1 Micro Metal Gearmotor MP
No product available!
75:1 Micro Metal Gearmotor MP
No product available!
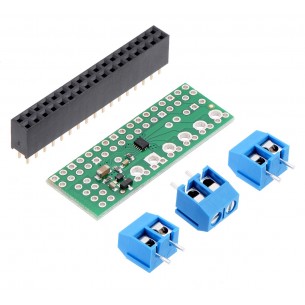
This compact expansion board plugs directly into the GPIO header on a Raspberry Pi B+, A+, or Pi 2 and provides an easy and low-cost solution for driving a pair of small brushed DC motors. Pololu 2753
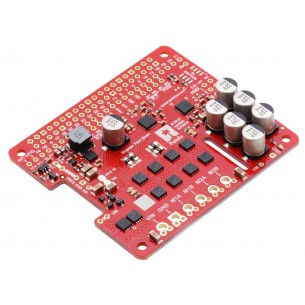
This add-on board makes it easy to control two high-power DC motors with a Raspberry Pi. Its twin discrete MOSFET H-bridges support a wide 6.5 V to 36 Voperating range and are efficient enough to deliver a continuous 14 A without a heat sink. The drivers offer basic current limiting functionality, and they accept ultrasonic PWM frequencies for quieter operation.
This add-on board makes it easy to control two high-power DC motors with a Raspberry Pi. Its twin discrete MOSFET H-bridges support a wide 6.5 V to 30 Voperating range and are efficient enough to deliver a continuous 18 A without a heat sink. The drivers offer basic current limiting functionality, and they accept ultrasonic PWM frequencies for quieter operation.
Atmel ATmega32U4 microcontroller comes preloaded with an Arduino-compatible bootloader, and the board includes dual motor drivers that can deliver 1.7 A per channel to two brushed DC motors. Pololu 3119
The core of a small robot, either as an auxiliary controller atop a Raspberry Pi base or as a complete control solution on its own. Its Atmel ATmega32U4 microcontroller comes preloaded with an Arduino-compatible bootloader. This version does not include any through-hole components or connectors, allowing for customized assembly or standalone use. Pololu 3118
This discrete MOSFET H-bridge motor driver enables bidirectional control of one high-power DC brushed motor. The small 1.3″ × 0.8″ board supports a wide 6.5 V to 30 V voltage range and is efficient enough to deliver a continuous 25 A without a heat sink.
No product available!
This discrete MOSFET H-bridge motor driver enables bidirectional control of one high-power DC brushed motor. The small 1.3″ × 0.8″ board supports a wide 6.5 V to 40 V voltage range and is efficient enough to deliver a continuous 21 A without a heat sink.
This add-on board enables a Raspberry Pi B+, Pi A+, Pi 2 or Pi 3 to drive a pair of brushed DC motors. Its dual MC33926 motor drivers operate from 5 V to 28 V and can deliver a continuous 3 A (5 A peak) per motor. The default pin mappings make it easy to get started using our provided software, but the board also exposes most of the driver chips’ I/O pins for more specialized applications.
No product available!
This compact breakout board for Maxim’s MAX14870 motor driver offers a wide operating voltage range of 4.5 V to 36 V and can deliver a continuous 1.7 A (2.5 A peak) to a single brushed DC motor. It features a simple two-pin speed/direction interface and built-in protection against reverse-voltage, under-voltage, over-current, and over-temperature.
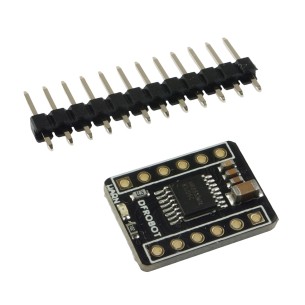
Two-channel DC motor driver based on the HR9933 circuit. It allows you to control the movement of drives with a supply voltage of up to 10 V and power consumption up to 1.5 A. DFRobot DRI0040
Single-channel DC motor driver that can control the movement of the drive with a supply voltage of up to 36 V and a current consumption of up to 15 A. Controlled by a PWM signal. DFRobot DRI0042
Ultra small Dual DC motor driver for some room limited projects. UVLO (Under Voltage Latch-Out) features a safe guard for your system. DRI0041
The power module together with the engine controller has been specially created for the Romi Chassis chassis. With its help, we will supply all components of our construction and we will be able to control the engines responsible for the movement of the chassis. Pololu 3543
Two-channel DC motor driver communicating via UART, SPI or I2C interface. It can control the movement of 3 to 11V motors with a maximum continuous current of 1.2A per channel. SparkFun ROB-13911
No product available!
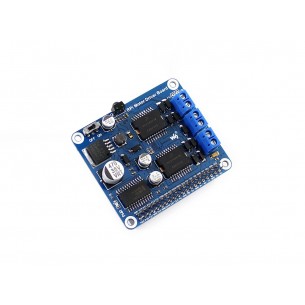
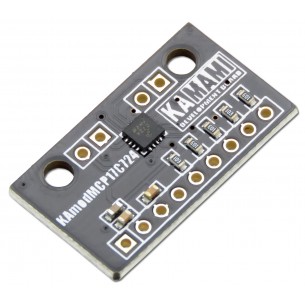
Raspberry Pi Expansion Board, DC Motor / Stepper Motor Driver
KAmodMPC17C724 is a module with a double MP bridge bridge type MPC17C724. The system allows you to control two DC brush motors or one bipolar stepping motor. The controller operates at a voltage range of 2.7 - 5.5 V and can work with motors with power consumption up to 0.4 A.
The X-NUCLEO-IHM12A1 is a low voltage dual brush DC motor driver expansion board based on the STSPIN240 for STM32 Nucleo. It provides an affordable and easy-to-use solution for the implementation of portable motor driving applications such as thermal printers, robotics and toys
No product available!
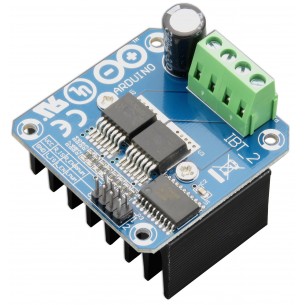
The high power motor driver module works on the basis of Infineon BTS7960B systems. Maximum controller current: 43 A, operating voltage range: 5.5V - 27V. The module has a heat sink and can be controlled from the Arduino, Raspberry Pi, and STM levels. IBT_2
No product available!
TB6612FNG Dual Motor Driver Carrier